Cristian C. Beltran-Hernandez
Senior Researcher | OMRON SINIC X Corporation

I am a Senior Researcher at OMRON SINIC X Corporation. I received my B.Sc. in computer science from the University of La Sabana, Colombia, in 2013, and my M.Eng. in intelligent systems and Ph.D. in engineering from Osaka University, in 2019 and 2022, respectively.
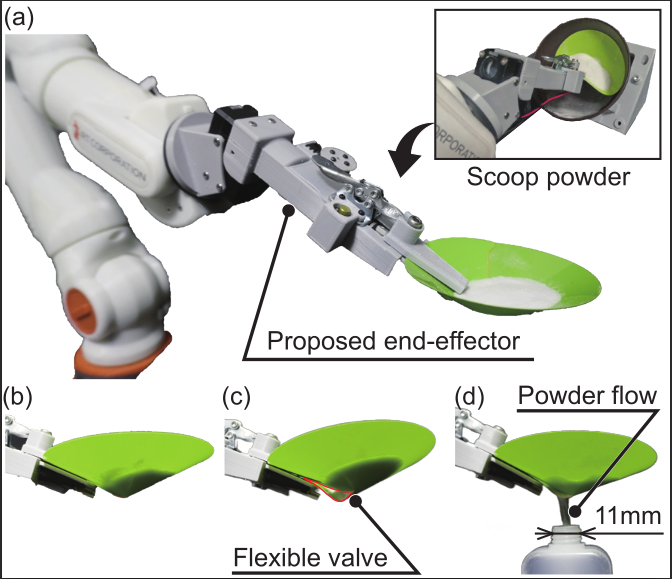
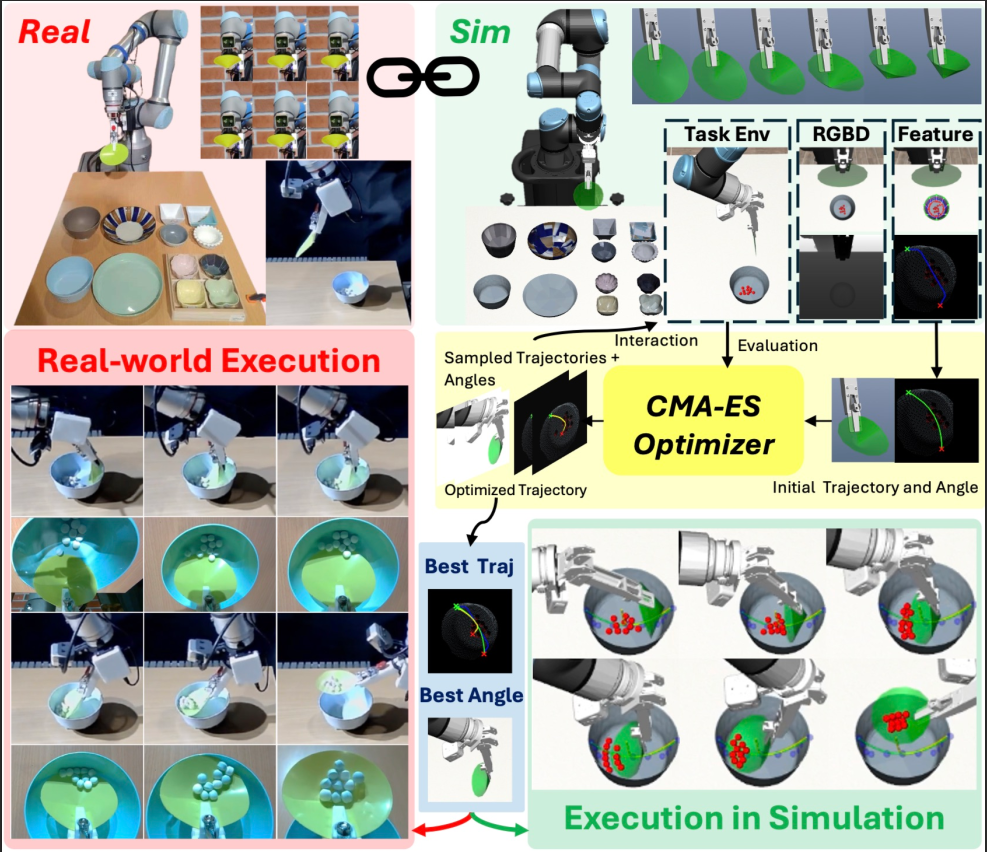
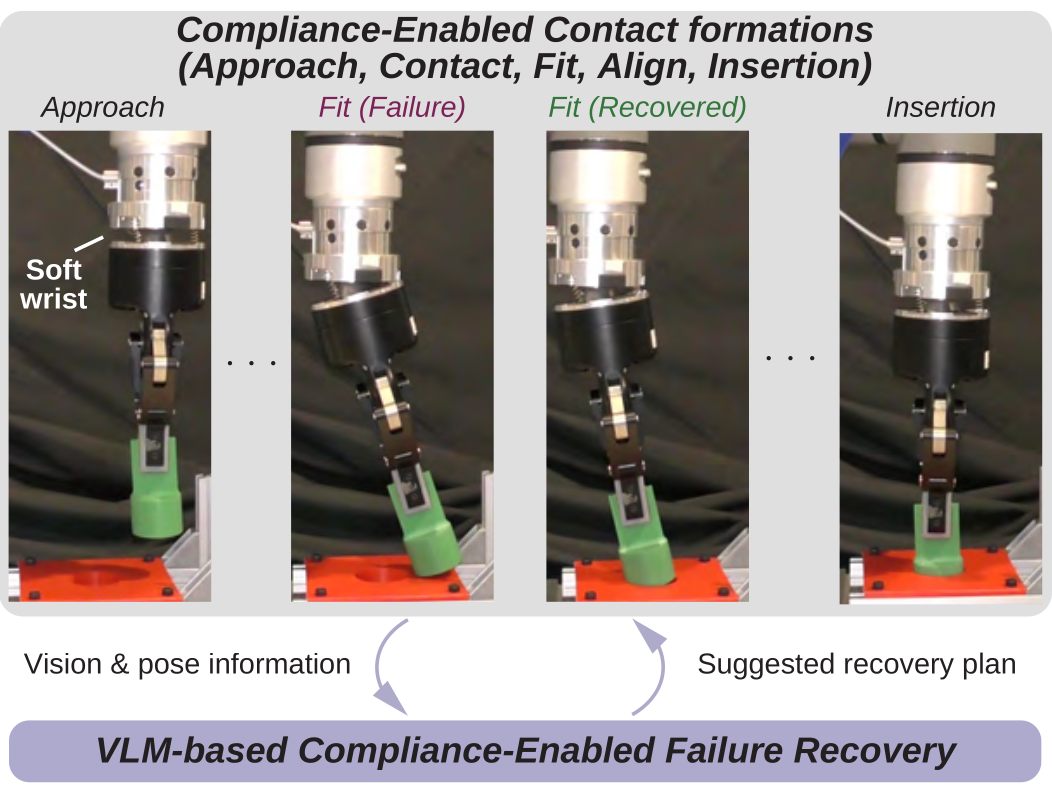
My research interests and current work focus on robot learning for contact-rich manipulation—from industrial assembly to everyday tasks, including learning force and compliance control with position-controlled robots (e.g. variable compliance and peg-in-hole assembly), hybrid trajectory-and-force learning for imitation of human assembly skills, vision–language-guided task and motion planning, robot learning for cooking (e.g. food slicing and TAMP for preparation), and soft robotics and tactile sensing for compliant assembly and insertion.
news
| Jun 17, 2026 | We have two papers accepted to IROS 2026!:
|
|---|---|
| Jun 01, 2026 | We got two papers were accepted to the journal of Robotics and Automation Letters!
|
| Feb 01, 2026 | We have three papers accepted to ICRA 2026!:
|
selected publications
- IROS