@article{siburian2026phase,author={Siburian, Jeremy and Beltran-Hernandez, Cristian Camilo and Matsushima, Tatsuya and Iwasawa, Yusuke and Hamaya, Masashi and Nishimura, Mai},title={PHASE: Compliance-Enabled Tactile Phase Retrieval for Few-Shot Insertion Learning},booktitle={IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)},year={2026},}
ArXiv
Refinement of Accelerated Demonstrations via Incremental Iterative Reference Learning Control for Fast Contact-Rich Imitation Learning
Koki Yamane, Cristian C Beltran-Hernandez, Steven Oh, Masashi Hamaya, and Sho Sakaino
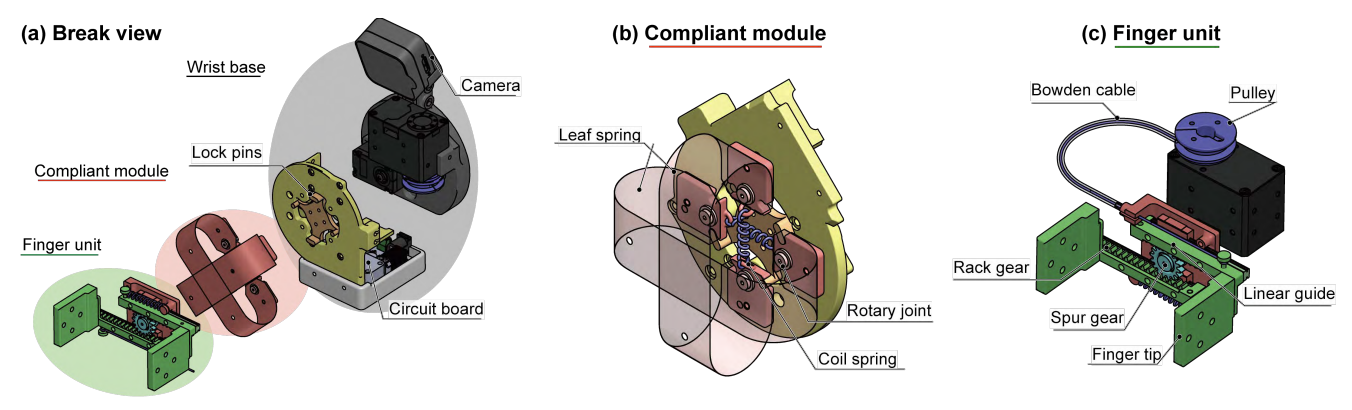
@article{oh2026softwristanisotropicselectable,title={A Soft Wrist with Anisotropic and Selectable Stiffness for Robust Robot Learning in Contact-rich Manipulation},author={Oh, Steven and Takahashi, Tomoya and Beltran-Hernandez, Cristian C. and Kuroda, Yuki and Hamaya, Masashi},year={2026},journal={arXiv preprint arXiv:2602.14434}}
RAL
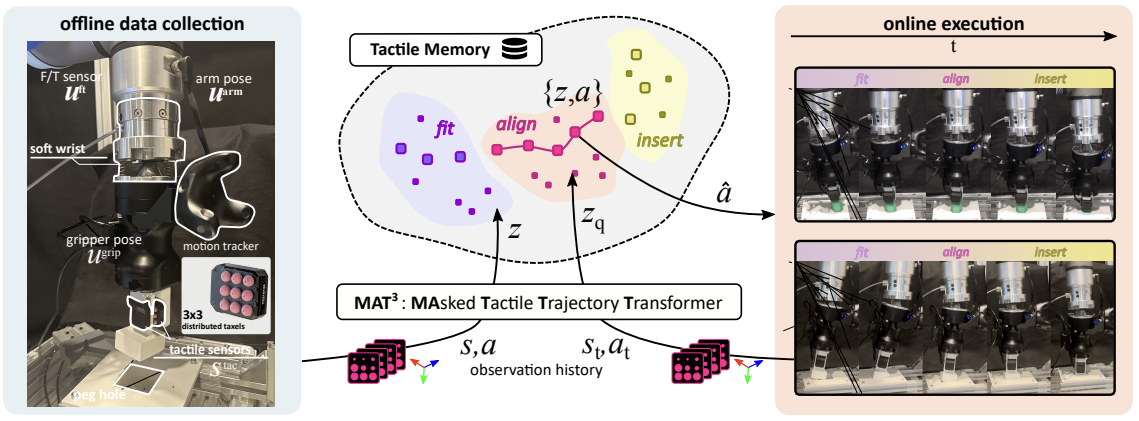
Tactile Memory with Soft Robot: Robust Object Insertion via Masked Encoding and Soft Wrist
Tatsuya Kamijo, Mai Nishimura, Cristian C Beltran-Hernandez, Nodoka Shibasaki, and Masashi Hamaya
@article{kamijo2026tactile,title={Tactile Memory with Soft Robot: Robust Object Insertion via Masked Encoding and Soft Wrist},author={Kamijo, Tatsuya and Nishimura, Mai and Beltran-Hernandez, Cristian C and Shibasaki, Nodoka and Hamaya, Masashi},journal={IEEE Robotics and Automation Letters},doi={10.1109/LRA.2026.3692097},year={2026},}
ICRA
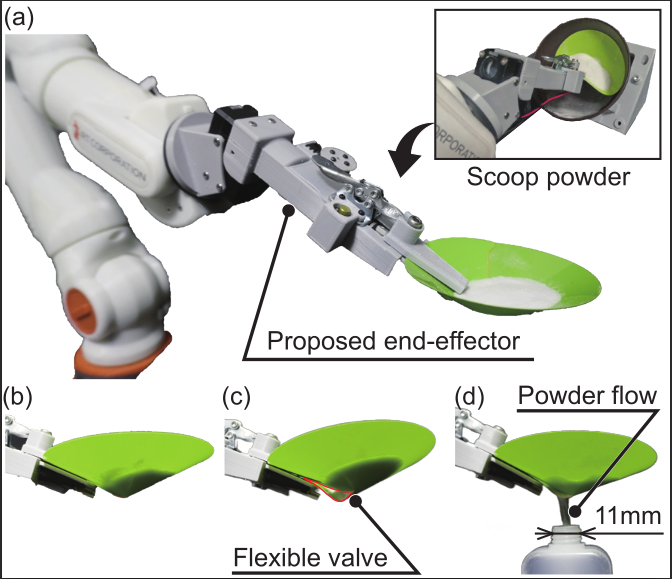
A Flexible Funnel-Shaped Robotic Hand with an Integrated Single-Sheet Valve for Milligram-Scale Powder Handling
Tomoya Takahashi, Yusaku Nakajima, Cristian C. Beltran-Hernandez, Yuki Kuroda, Kazutoshi Tanaka, and 3 more authors
In IEEE International Conference on Robotics and Automation (ICRA), 2026
@inproceedings{takahashi2026scuhand,author={Takahashi, Tomoya and Nakajima, Yusaku and Beltran-Hernandez, Cristian C. and Kuroda, Yuki and Tanaka, Kazutoshi and Hamaya, Masashi and Ono, Kanta and Ushiku, Yoshitaka},title={A Flexible Funnel-Shaped Robotic Hand with an Integrated Single-Sheet Valve for Milligram-Scale Powder Handling },booktitle={IEEE International Conference on Robotics and Automation (ICRA)},year={2026},}
ICRA
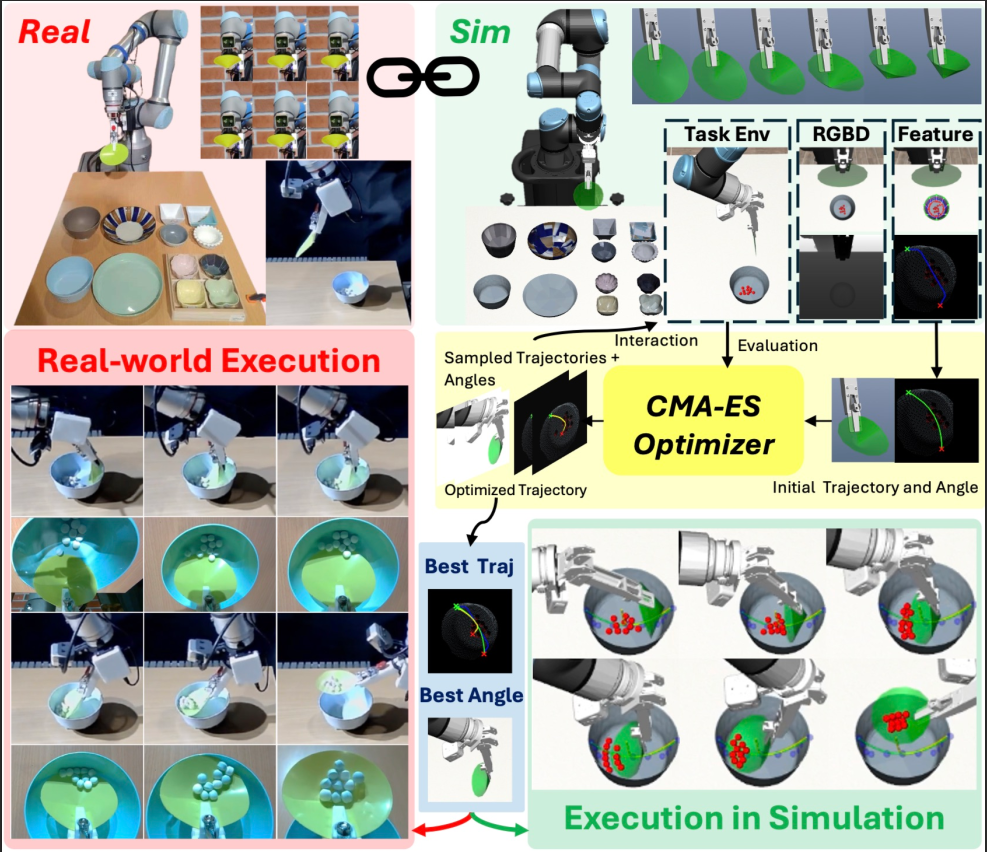
Simulation-Driven Evolutionary Motion Parameterization for Contact-Rich Granular Scooping with a Soft Conical Robotic Hand
Yongliang Wang, Cristian C. Beltran-Hernandez, Tomoya Takahashi, and Masashi Hamaya
In IEEE International Conference on Robotics and Automation (ICRA), 2026
@inproceedings{yongliang2026simulation,title={Simulation-Driven Evolutionary Motion Parameterization for Contact-Rich Granular Scooping with a Soft Conical Robotic Hand},author={Wang, Yongliang and Beltran-Hernandez, Cristian C. and Takahashi, Tomoya and Hamaya, Masashi},booktitle={IEEE International Conference on Robotics and Automation (ICRA)},year={2026},url={https://arxiv.org/abs/2509.17666}}
ICRA
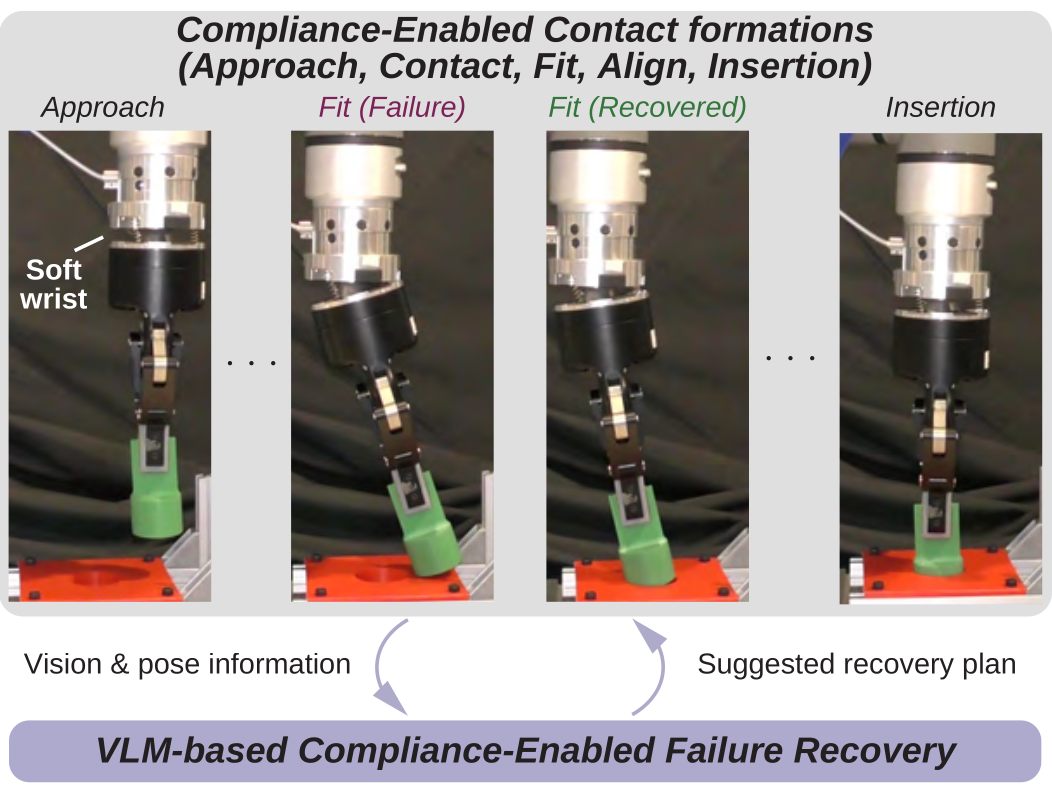
Robust and Resilient Soft Robotic Object Insertion with Compliance-Enabled Contact Formation and Failure Recovery
Mimo Shirasaka, Cristian C. Beltran-Hernandez, Masashi Hamaya, and Yoshitaka Ushiku
In IEEE International Conference on Robotics and Automation (ICRA), 2026
@inproceedings{shirasaka2026recovery,title={Robust and Resilient Soft Robotic Object Insertion with Compliance-Enabled Contact Formation and Failure Recovery},author={Shirasaka, Mimo and Beltran-Hernandez, Cristian C. and Hamaya, Masashi and Ushiku, Yoshitaka},booktitle={IEEE International Conference on Robotics and Automation (ICRA)},year={2026},url={https://arxiv.org/abs/2509.17666},}
SII
Stable In-Hand Manipulation for a Lightweight Four-Motor Prosthetic Hand
@inproceedings{kuroda2026stable,title={Stable In-Hand Manipulation for a Lightweight Four-Motor Prosthetic Hand},author={Kuroda, Yuki and Takahashi, Tomoya and Beltran-Hernandez, Cristian C. and Hamaya, Masashi and Tanaka, Kazutoshi},year={2026},url={https://arxiv.org/abs/2601.07559},}
SII
Learning Diffusion Policies from Demonstrations For Compliant Contact-rich Manipulation
Malek Aburub, Cristian C. Beltran-Hernandez, Tatsuya Kamijo, and Masashi Hamaya
@inproceedings{aburub2024learning,title={Learning Diffusion Policies from Demonstrations For Compliant Contact-rich Manipulation},author={Aburub, Malek and Beltran-Hernandez, Cristian C. and Kamijo, Tatsuya and Hamaya, Masashi},year={2026},archiveprefix={arXiv},primaryclass={cs.RO},url={https://arxiv.org/abs/2410.19235},}
IROS
Grounded Vision-Language Interpreter for Integrated Task and Motion Planning
Cristian C. Beltran-Hernandez, Jeremy Siburian, Keisuke Shirai, Masashi Hamaya, Michael Görner, and 1 more author
@misc{siburian2025groundedvisionlanguageinterpreterintegrated,title={Grounded Vision-Language Interpreter for Integrated Task and Motion Planning},author={Beltran-Hernandez, Cristian C. and Siburian, Jeremy and Shirai, Keisuke and Hamaya, Masashi and Görner, Michael and Hashimoto, Atsushi},year={2026},archiveprefix={arXiv},primaryclass={cs.RO},}
2025
Under Review
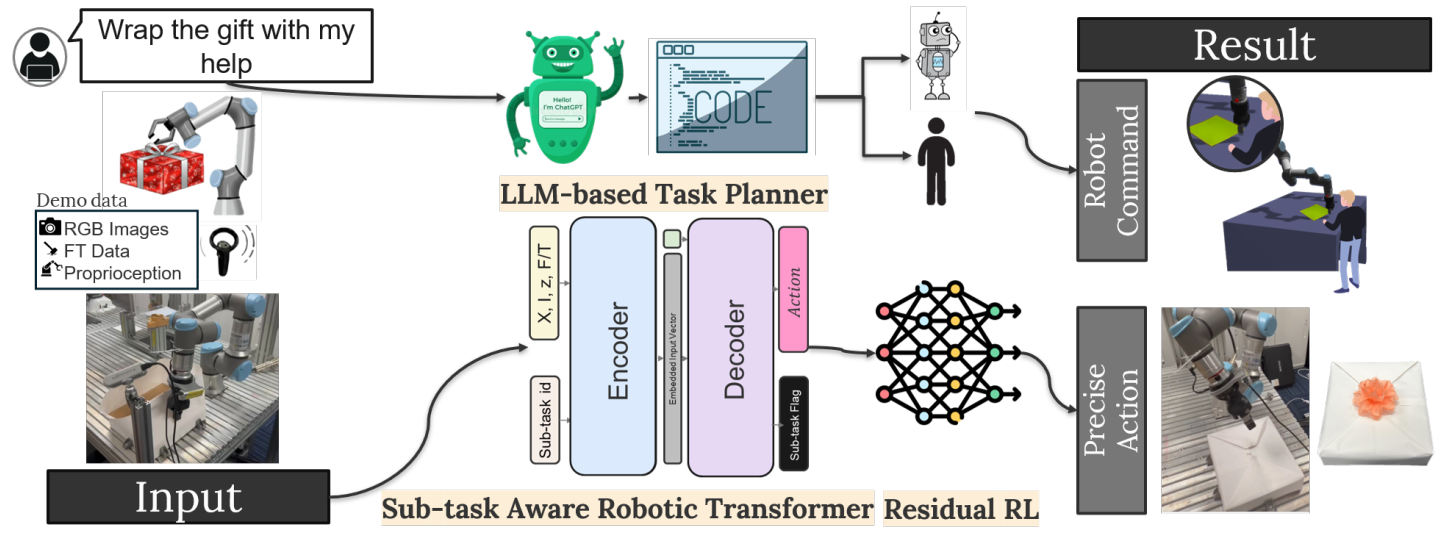
Learning-based Cooperative Robotic Paper Wrapping: A Unified Control Policy with Residual Force Control
@misc{ali2025learning,title={Learning-based Cooperative Robotic Paper Wrapping: A Unified Control Policy with Residual Force Control},author={Ali, Rewida and Beltran-Hernandez, Cristian C and Wan, Weiwei and Harada, Kensuke},primaryclass={cs.RO},year={2025},}
IEEE Access
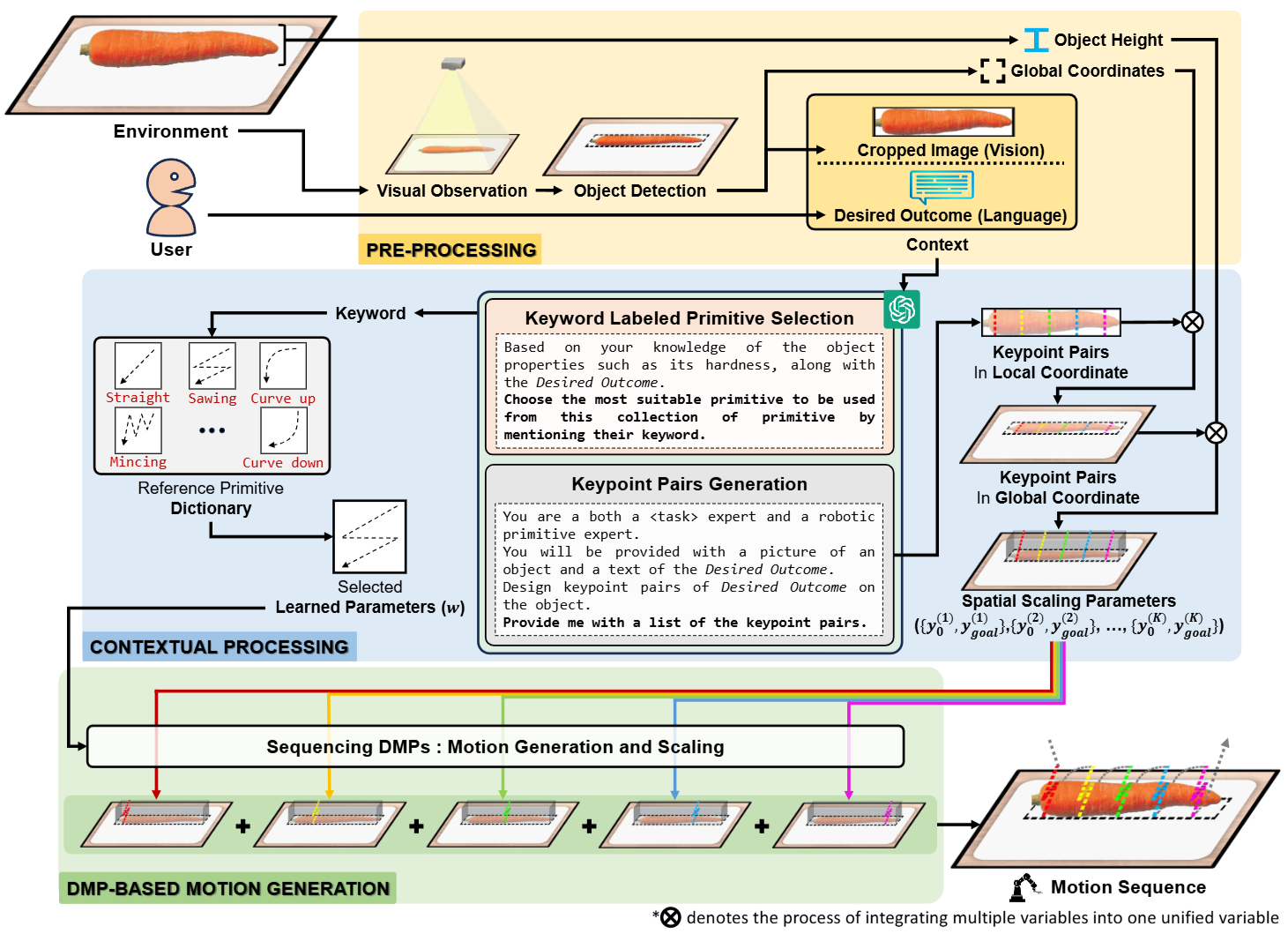
KeyMPs: One-Shot Vision-Language Guided Motion Generation by Sequencing DMPs for Occlusion-Rich Tasks
Edgar Anarossi, Yuhwan Kwon, Hirotaka Tahara, Shohei Tanaka, Keisuke Shirai, and 4 more authors
@misc{anarossi2025keympsoneshotvisionlanguageguided,title={KeyMPs: One-Shot Vision-Language Guided Motion Generation by Sequencing DMPs for Occlusion-Rich Tasks},author={Anarossi, Edgar and Kwon, Yuhwan and Tahara, Hirotaka and Tanaka, Shohei and Shirai, Keisuke and Hamaya, Masashi and Beltran-Hernandez, Cristian C. and Hashimoto, Atsushi and Matsubara, Takamitsu},journal={IEEE Access},year={2025},volume={13},number={},pages={125420-125441},doi={10.1109/ACCESS.2025.3588975},}
ICORR
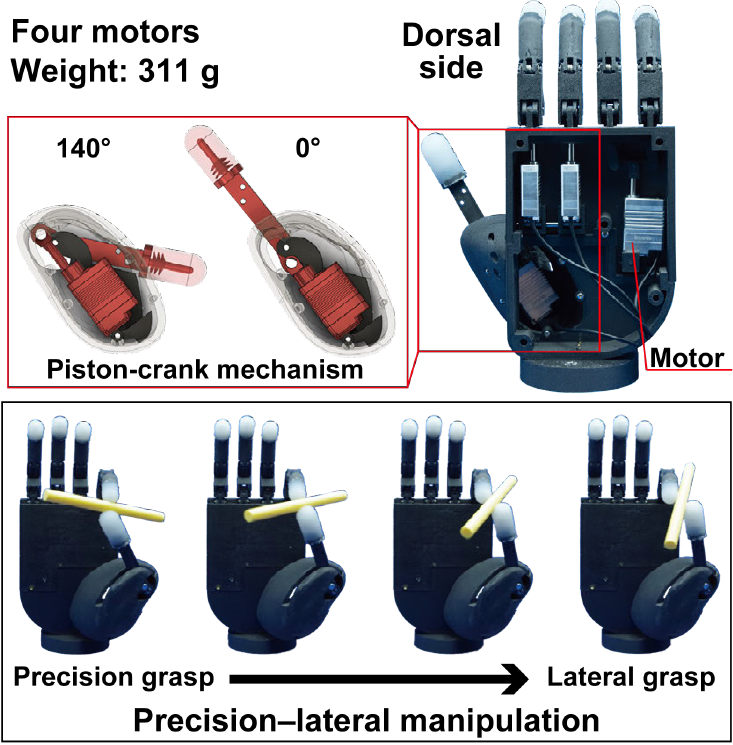
PLEXUS Hand: Lightweight Four-Motor Prosthetic Hand Enabling Precision-Lateral Dexterous Manipulation
@inproceedings{kuroda2025plexushand,author={Kuroda, Yuki and Takahashi, Tomoya and Beltran-Hernandez, Cristian C. and Hamaya, Masashi and Tanaka, Kazutoshi},title={PLEXUS Hand: Lightweight Four-Motor Prosthetic Hand Enabling Precision-Lateral Dexterous Manipulation},booktitle={IEEE-RAS-EMBS International Conference on Rehabilitation Robotics (ICORR)},year={2025},}
ICRA
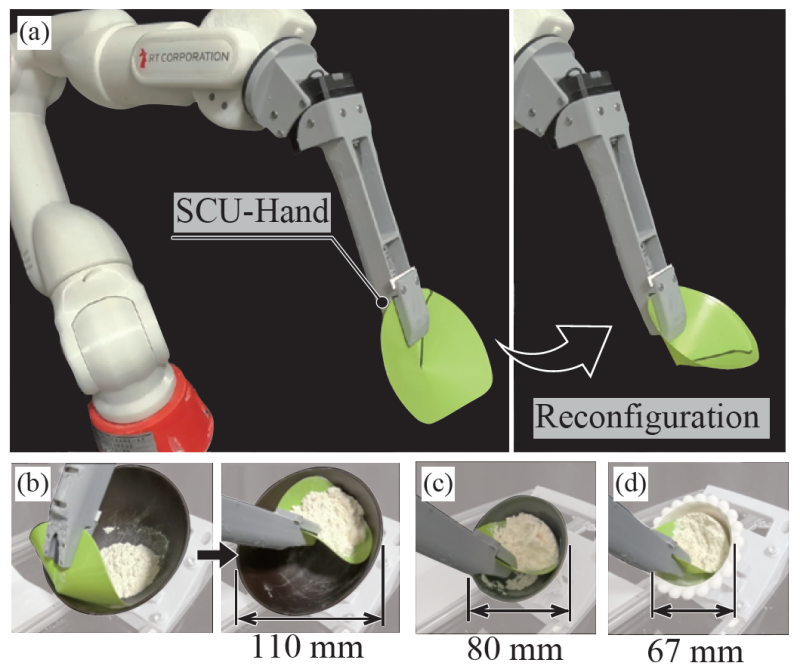
SCU-Hand: Soft Conical Universal Robotic Hand for Scooping Granular Media from Containers of Various Sizes
@inproceedings{takahashi2025scuhand,author={Takahashi, Tomoya and Beltran-Hernandez, Cristian C. and Kuroda, Yuki and Tanaka, Kazutoshi and Hamaya, Masashi and Ushiku, Yoshitaka},title={SCU-Hand: Soft Conical Universal Robotic Hand for Scooping Granular Media from Containers of Various Sizes},booktitle={IEEE International Conference on Robotics and Automation (ICRA)},year={2025},}
SII
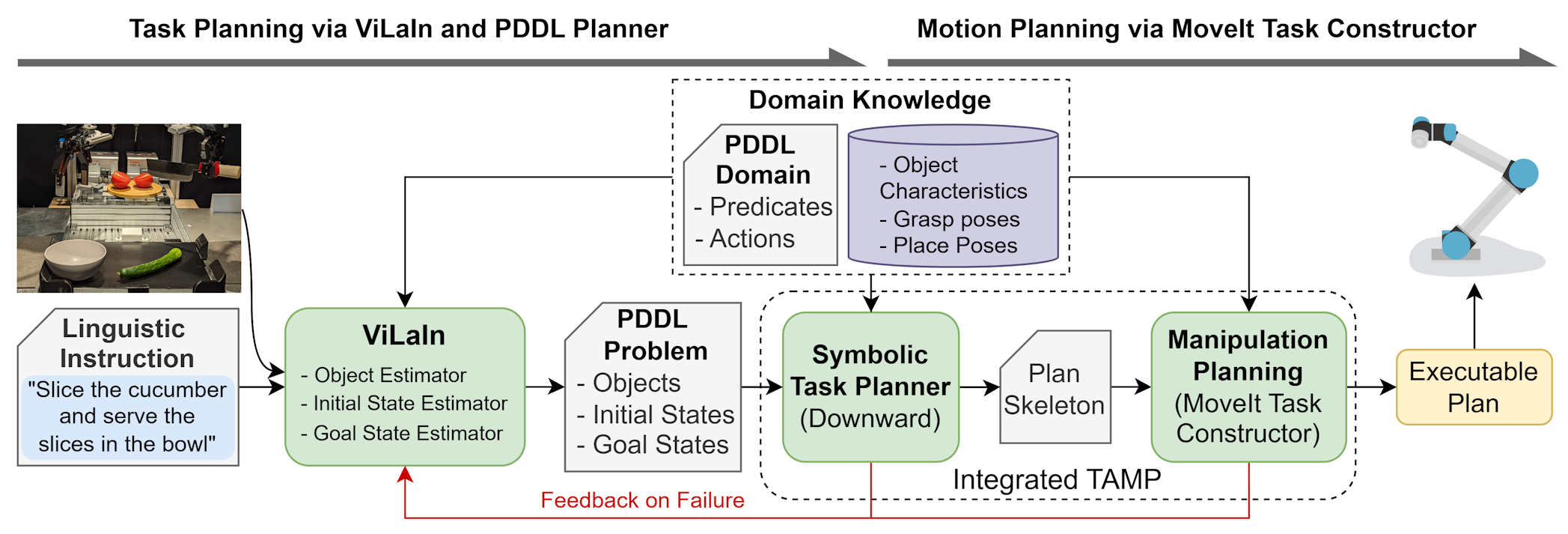
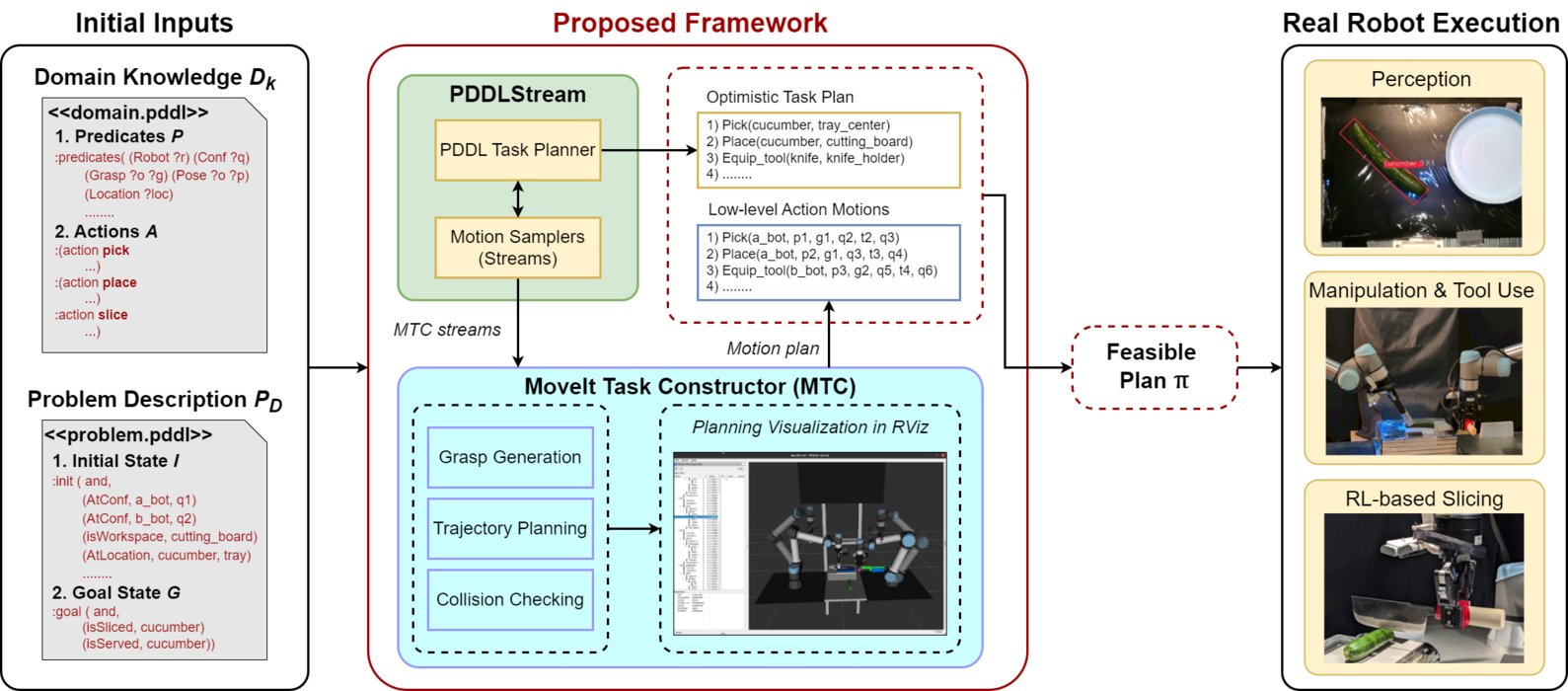
Practical Task and Motion Plannign for Robotic Food Preparation
Jeremy Siburian, Cristian C. Beltran-Hernandez, and Masashi Hamaya
In IEEE/SICE International Symposium on System Integrations, 2025
@inproceedings{siburian2025integrated,author={Siburian, Jeremy and Beltran-Hernandez, Cristian C. and Hamaya, Masashi},title={Practical Task and Motion Plannign for Robotic Food Preparation},booktitle={IEEE/SICE International Symposium on System Integrations},year={2025},doi={10.1109/SII59315.2025.10870896},}
2024
IROS
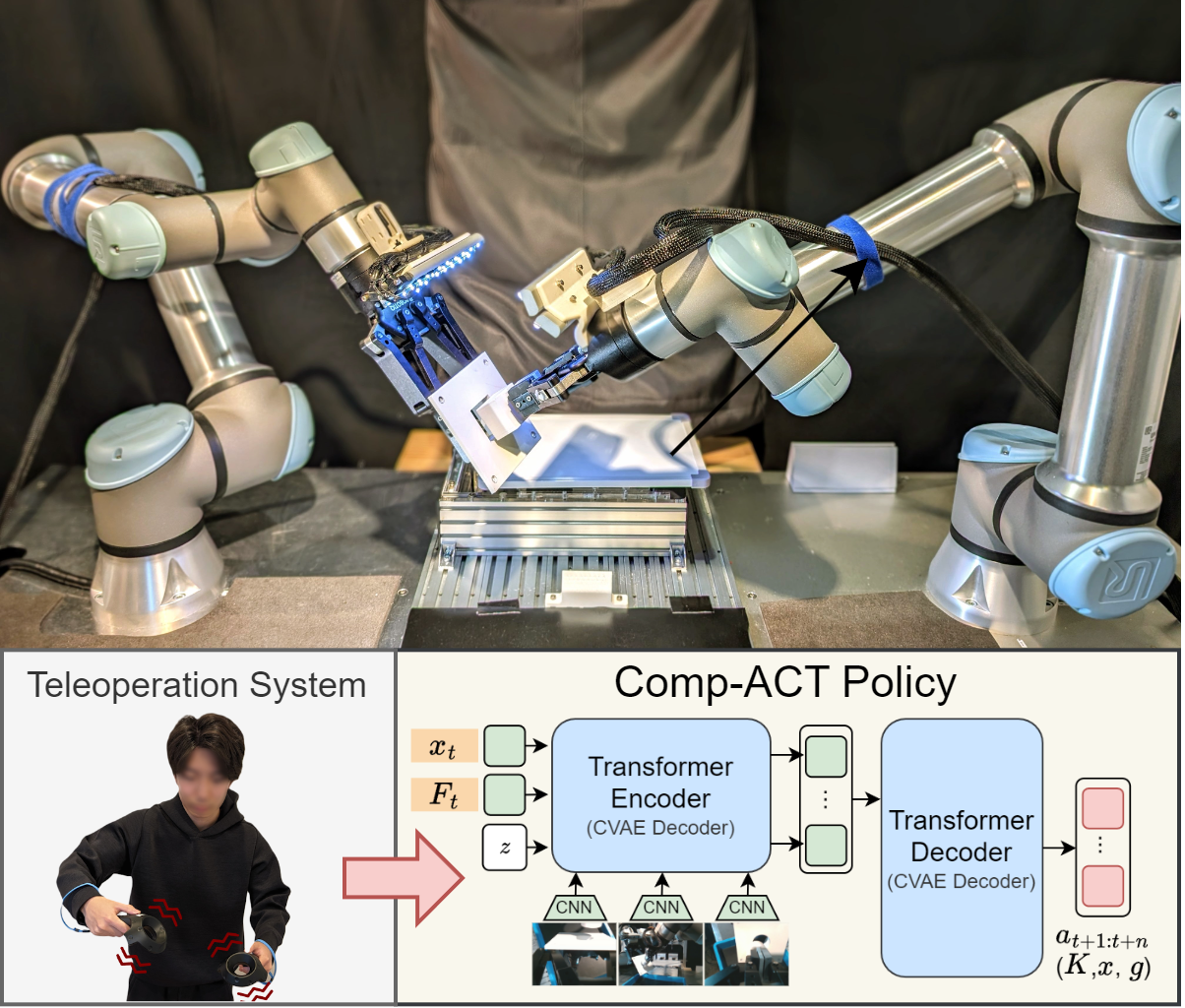
Learning Variable Compliance Control From a Few Demonstrations for Bimanual Robot with Haptic Feedback Teleoperation System
Tatsuya Kamijo, Cristian C. Beltran-Hernandez, and Masashi Hamaya
In IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2024
2nd Best Poster - Collecting, Managing, and Utilizing Data through embodied Robots workshop - IROS2024
@inproceedings{kamijo2024learning,author={Kamijo, Tatsuya and Beltran-Hernandez, Cristian C. and Hamaya, Masashi},title={Learning Variable Compliance Control From a Few Demonstrations for Bimanual Robot with Haptic Feedback Teleoperation System},booktitle={IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)},year={2024},}
IROS
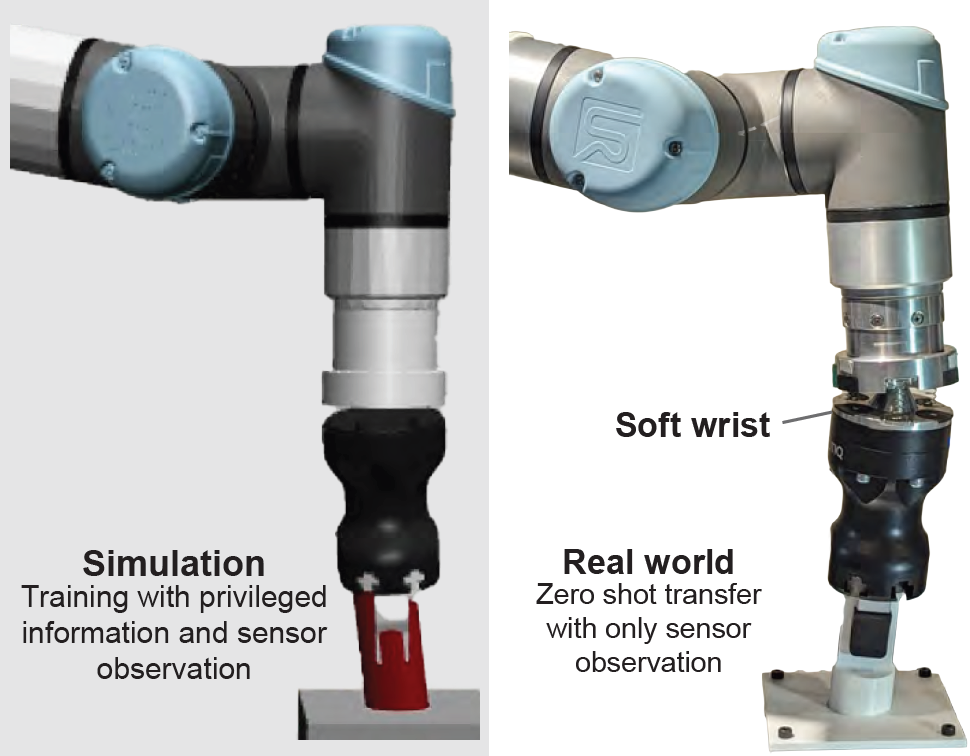
Robotic Object Insertion with a Soft Wrist through Sim-to-Real Privileged Training
Yuni Fuchioka, Cristian C. Beltran-Hernandez, Nguyen Hai, and Masashi Hamaya
In IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2024
@inproceedings{yuni2024soft,author={Fuchioka, Yuni and Beltran-Hernandez, Cristian C. and Hai, Nguyen and Hamaya, Masashi},title={Robotic Object Insertion with a Soft Wrist through Sim-to-Real Privileged Training},year={2024},booktitle={IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)},}
IROS
Low-cost air hockey robot using a five-bar linkage mechanism driven by position-control servomotors
Best Entertainment and Amusement Papers Finalist - IROS2024
@inproceedings{shinjo2024airhockey,author={Shinjo, Mirai and Beltran-Hernandez, Cristian C. and Hamaya, Masashi and Tanaka, Kazutoshi},title={Low-cost air hockey robot using a five-bar linkage mechanism driven by position-control servomotors},year={2024},booktitle={IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)},}
ICRA Workshop
Integrated Task and Motion Planning for Real-World Cooking Tasks
Jeremy Siburian, Cristian C. Beltran-Hernandez, and Masashi Hamaya
In ICRA Workshop on Cooking Robotics: Perception and Motion Planning, 2024
@inproceedings{siburian2024integrated,author={Siburian, Jeremy and Beltran-Hernandez, Cristian C. and Hamaya, Masashi},title={Integrated Task and Motion Planning for Real-World Cooking Tasks},booktitle={ICRA Workshop on Cooking Robotics: Perception and Motion Planning},year={2024},}
ICRA
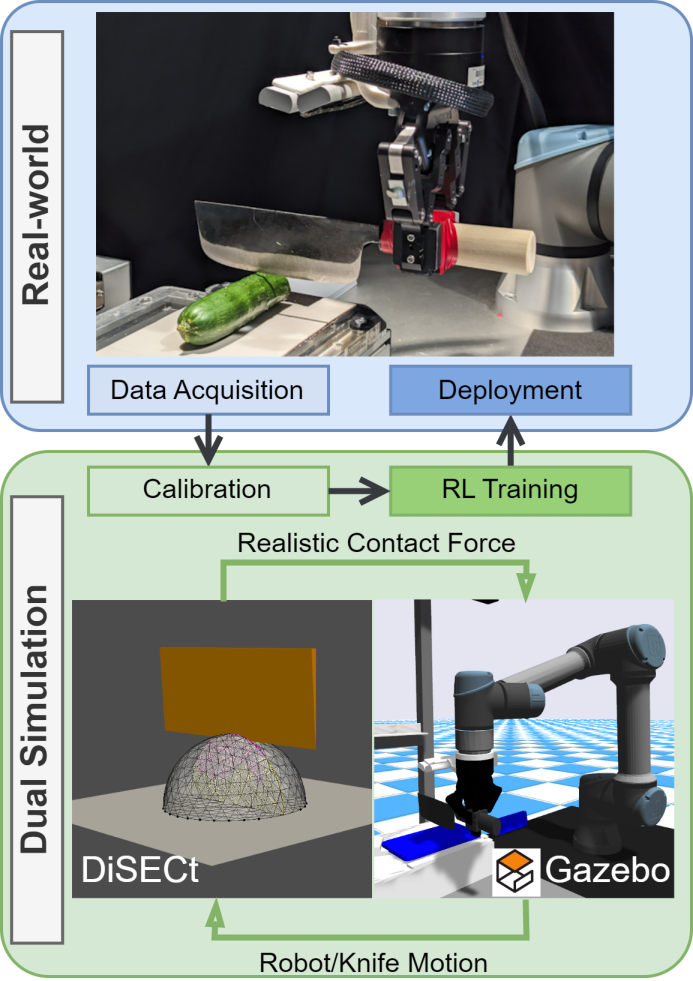
SliceIt! - A Dual Simulator Framework for Learning Robot Food Slicing
Cristian C. Beltran-Hernandez, Nicolas Erbetti, and Masashi Hamaya
In IEEE International Conference on Robotics and Automation (ICRA), 2024
Best Poster - Cooking Robotics workshop - ICRA2024
@inproceedings{beltran2024sliceit,author={Beltran-Hernandez, Cristian C. and Erbetti, Nicolas and Hamaya, Masashi},title={SliceIt! - A Dual Simulator Framework for Learning Robot Food Slicing},year={2024},booktitle={IEEE International Conference on Robotics and Automation (ICRA)},}
ICRA
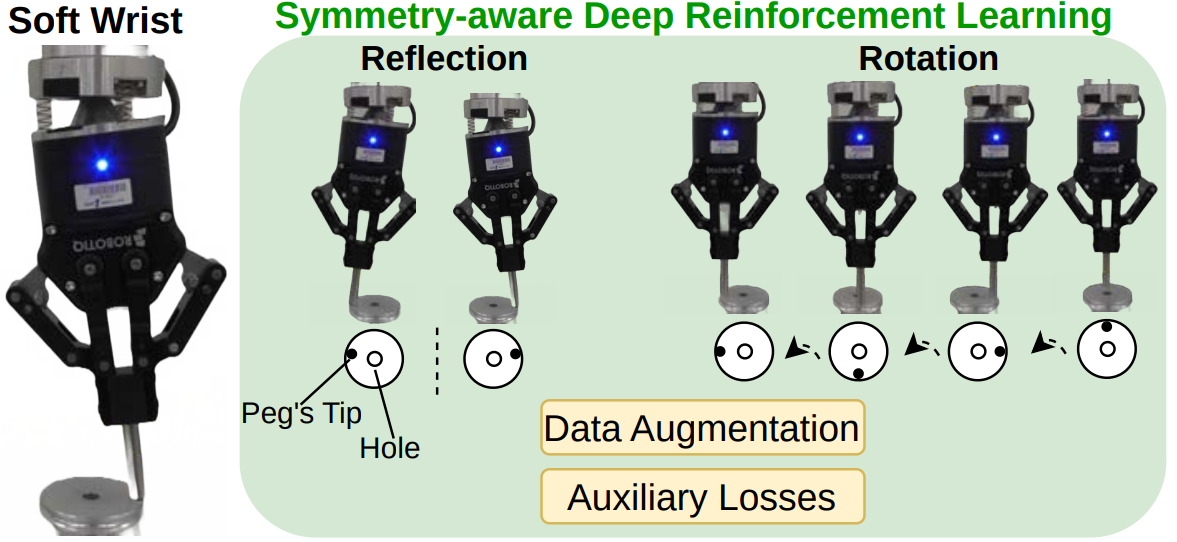
Symmetry-aware Reinforcement Learning for Robotic Assembly under Partial Observability with a Soft Wrist
@inproceedings{hai2023symmetry,author={Nguyen, Hai and Kozuno, Tadashi and Beltran-Hernandez, Cristian C. and Hamaya, Masashi},title={Symmetry-aware Reinforcement Learning for Robotic Assembly under Partial Observability with a Soft Wrist},year={2024},booktitle={IEEE International Conference on Robotics and Automation (ICRA)},}
ICRA
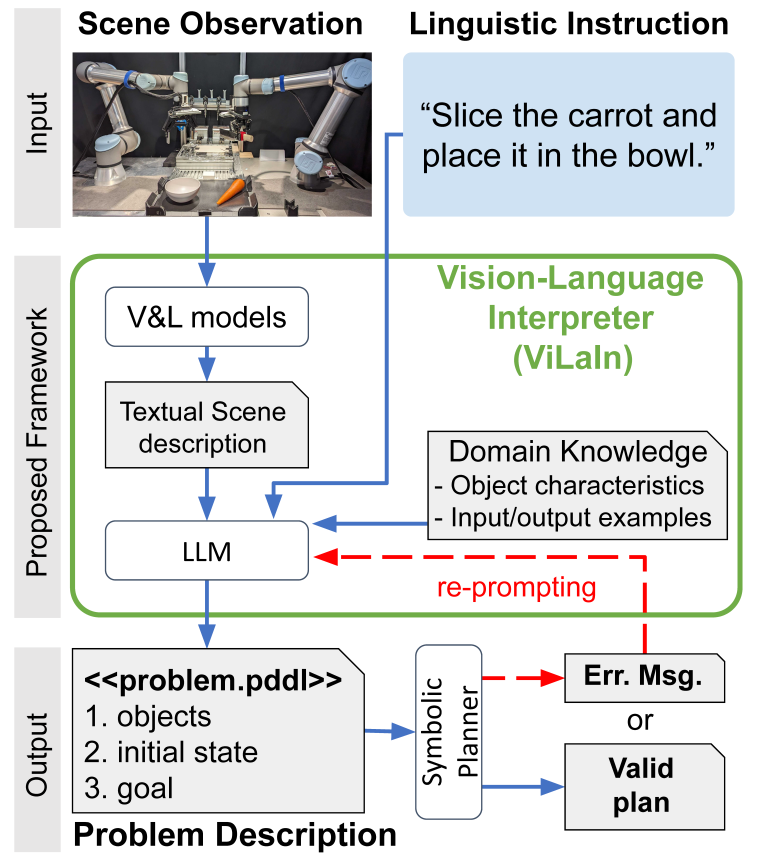
Vision-Language Interpreter for Robot Task Planning
Keisuke Shirai, Cristian C. Beltran-Hernandez, Masashi Hamaya, Atsushi Hashimoto, Shohei Tanaka, and 4 more authors
In IEEE International Conference on Robotics and Automation (ICRA), 2024
@inproceedings{shirai2023vision,author={Shirai, Keisuke and Beltran-Hernandez, Cristian C. and Hamaya, Masashi and Hashimoto, Atsushi and Tanaka, Shohei and Kawaharazuka, Kento and Tanaka, Kazutoshi and Ushiku, Yoshitaka and Mori, Shinsuke},title={Vision-Language Interpreter for Robot Task Planning},year={2024},booktitle={IEEE International Conference on Robotics and Automation (ICRA)},}
2023
IROS
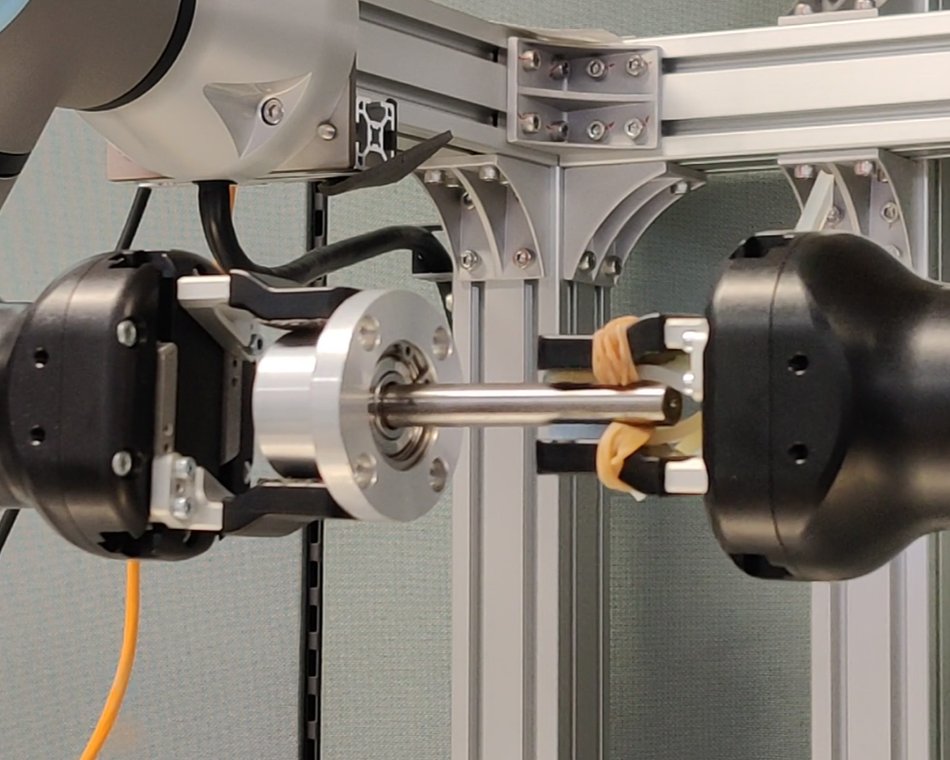
Learning Robotic Assembly by Leveraging Physical Softness and Tactile Sensing
@inproceedings{royo2023learning,author={Royo-Miquel, Joaquín and Hamaya, Masashi and Beltran-Hernandez, Cristian C. and Tanaka, Kazutoshi},booktitle={IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)},title={Learning Robotic Assembly by Leveraging Physical Softness and Tactile Sensing},year={2023},pages={6469-6476},keywords={Wrist;Robotic assembly;Training;Uncertainty;Tactile sensors;Soft robotics;Sensors},doi={10.1109/IROS55552.2023.10341471},}
2022
Advance Robotics
Team O2AC at the World Robot Summit 2020: Towards Jigless, High-Precision Assembly
@article{von2022o2ac,author={von Drigalski, Felix and Kasaura, Kazumi and Beltran-Hernandez, Cristian C. and Hamaya, Masashi and Tanaka, Kazutoshi and Matsubara, Takamitsu},journal={Advance Robotics},title={Team O2AC at the World Robot Summit 2020: Towards Jigless, High-Precision Assembly},volume={36},number={22},pages={1213--1227},year={2022},publisher={Taylor \& Francis},doi={10.1080/01691864.2022.2138541},}
IROS+RAL
Uncertainty-Aware Manipulation Planning Using Gravity and Environment Geometry
@article{von2022uncertainty,author={von Drigalski, Felix and Kasaura, Kazumi and Beltran-Hernandez, Cristian C. and Hamaya, Masashi and Tanaka, Kazutoshi and Matsubara, Takamitsu},journal={IEEE Robotics and Automation Letters},title={Uncertainty-Aware Manipulation Planning Using Gravity and Environment Geometry},year={2022},volume={7},number={4},pages={11942-11949},doi={10.1109/LRA.2022.3207565},}
ArXiv
Accelerating Robot Learning of Contact-Rich Manipulations: A Curriculum Learning Study
@unpublished{beltran2022accelerating,title={Accelerating Robot Learning of Contact-Rich Manipulations: A Curriculum Learning Study},author={Beltran-Hernandez, Cristian C and Petit, Damien and Ramirez-Alpizar, Ixchel G and Harada, Kensuke},journal={arXiv preprint arXiv:2204.12844},year={2022},doi={10.48550/arXiv.2204.12844},}
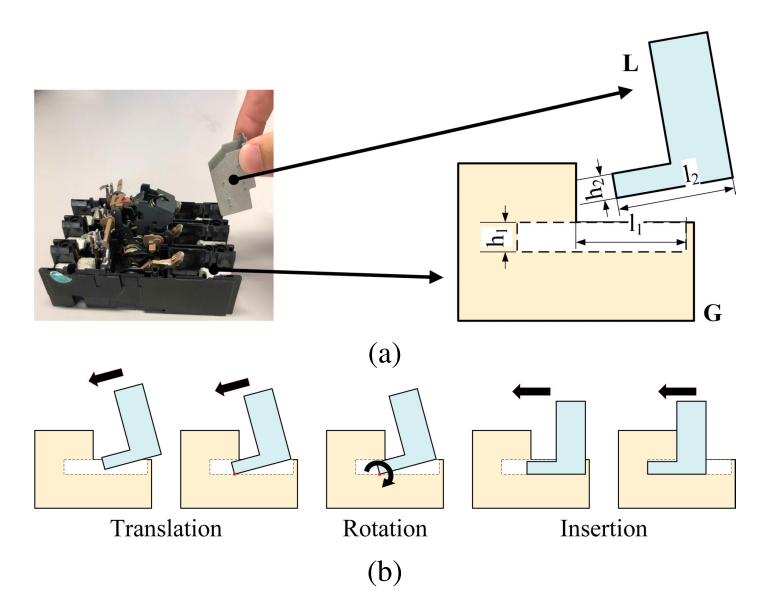
An Adaptive Imitation Learning Framework for Robotic Complex Contact-Rich Insertion Tasks
@article{wang2022adaptive,title={An Adaptive Imitation Learning Framework for Robotic Complex Contact-Rich Insertion Tasks},author={Wang, Yan and Beltran-Hernandez, Cristian C and Wan, Weiwei and Harada, Kensuke},journal={Frontiers in Robotics and AI},pages={414},year={2022},publisher={Frontiers},doi={10.3389/frobt.2021.777363},}
RSJ
Curriculum Reinforcement Learning for Industrial Insertion Tasks
@inproceedings{beltran2022rsj,title={Curriculum Reinforcement Learning for Industrial Insertion Tasks},author={Beltran, Cristian and Petit, Damien and Ramirez-Alpizar, Ixchel and Harada, Kensuke},booktitle={第40回日本ロボット学会学術講演会 RSJ2022},year={2022},organization={RSJ}}
2021
Hybrid Trajectory and Force Learning of Complex Assembly Tasks: A Combined Learning Framework
@article{wang2021hybrid,author={Wang, Yan and Beltran-Hernandez, Cristian C. and Wan, Weiwei and Harada, Kensuke},journal={IEEE Access},title={Hybrid Trajectory and Force Learning of Complex Assembly Tasks: A Combined Learning Framework},year={2021},volume={9},number={},pages={60175-60186},doi={10.1109/ACCESS.2021.3073711},}
ICRA
Robotic Imitation of Human Assembly Skills Using Hybrid Trajectory and Force Learning
@inproceedings{wang2021robotic,author={Wang, Yan and Beltran-Hernandez, Cristian C. and Wan, Weiwei and Harada, Kensuke},booktitle={IEEE International Conference on Robotics and Automation (ICRA)},title={Robotic Imitation of Human Assembly Skills Using Hybrid Trajectory and Force Learning},year={2021},volume={},number={},pages={11278-11284},doi={10.1109/ICRA48506.2021.9561619},}
2020
Variable compliance control for robotic peg-in-hole assembly: A deep-reinforcement-learning approach
@article{beltran2020variable,title={Variable compliance control for robotic peg-in-hole assembly: A deep-reinforcement-learning approach},author={Beltran-Hernandez, Cristian C and Petit, Damien and Ramirez-Alpizar, Ixchel G and Harada, Kensuke},journal={Applied Sciences},volume={10},number={19},pages={6923},year={2020},publisher={MDPI},doi={10.3390/app10196923},}
IROS + RAL
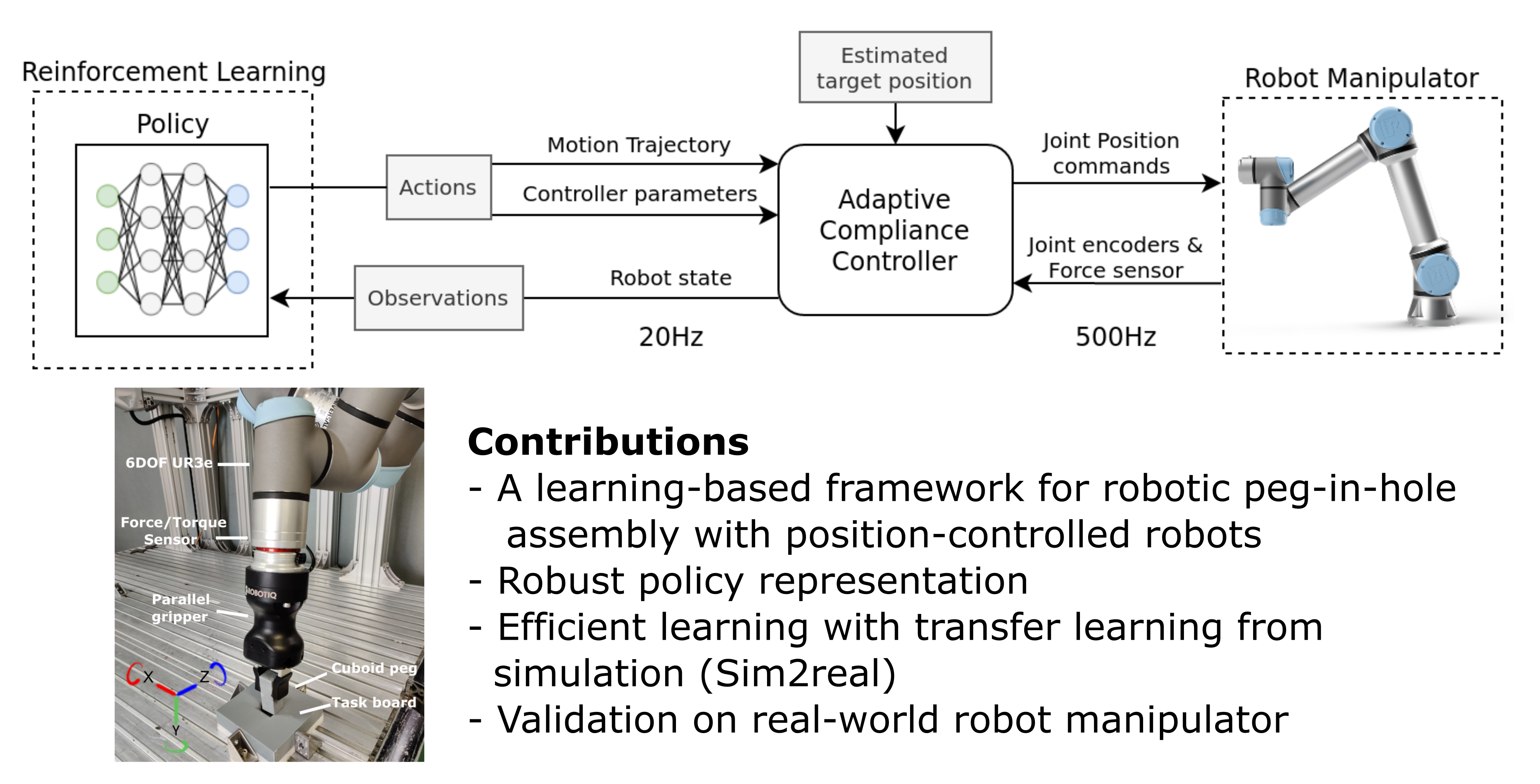
Learning Force Control for Contact-rich Manipulation Tasks with Rigid Position-controlled Robots
Cristian Camilo Beltran-Hernandez, Damien Petit, Ixchel Georgina Ramirez-Alpizar, Takayuki Nishi, Shinichi Kikuchi, and 2 more authors
@article{beltran2020learning,title={Learning Force Control for Contact-rich Manipulation Tasks with Rigid Position-controlled Robots},author={Beltran-Hernandez, Cristian Camilo and Petit, Damien and Ramirez-Alpizar, Ixchel Georgina and Nishi, Takayuki and Kikuchi, Shinichi and Matsubara, Takamitsu and Harada, Kensuke},journal={IEEE Robotics and Automation Letters},volume={5},number={4},pages={5709--5716},year={2020},publisher={IEEE},doi={10.1109/LRA.2020.3010739},}
2019
RSJ
Reinforcement Learning Framework for Real-world Robotic Arm
@inproceedings{beltran2019robotframework,title={Reinforcement Learning Framework for Real-world Robotic Arm},author={Beltran, Cristian and Petit, Damien and Matsubara, Takamitsu and Ramirez-Alpizar, Ixchel and Harada, Kensuke},booktitle={第37回日本ロボット学会学術講演会 RSJ2019},year={2019},organization={RSJ}}
SII
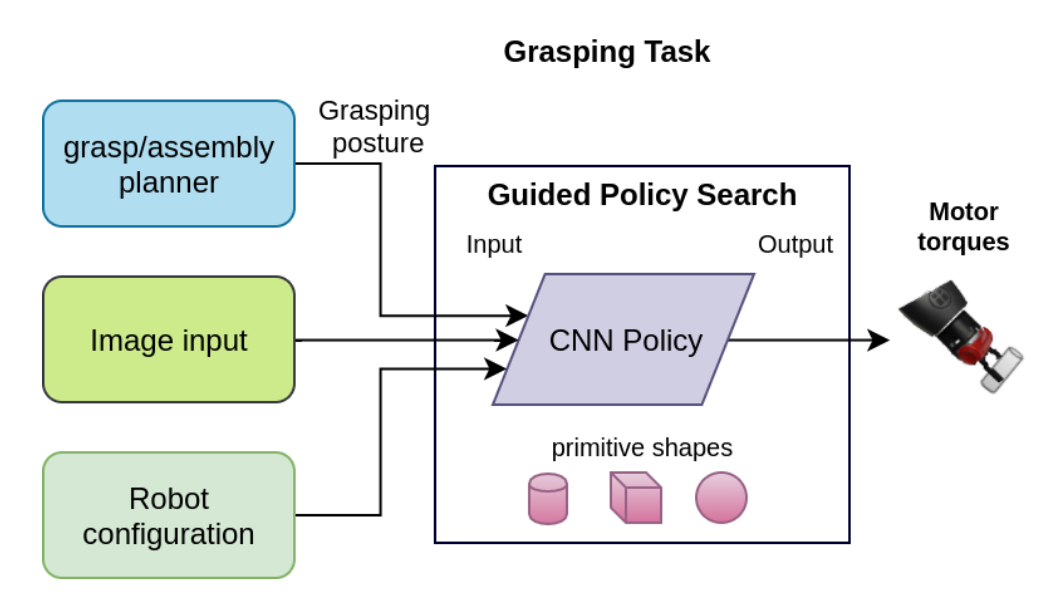
Learning to Grasp with Primitive Shaped Object Policies
@inproceedings{beltran2019learning,title={Learning to Grasp with Primitive Shaped Object Policies},author={Beltran-Hernandez, Cristian C and Petit, Damien and Ramirez-Alpizar, Ixchel G and Harada, Kensuke},booktitle={IEEE/SICE International Symposium on System Integration (SII)},pages={468--473},year={2019},organization={IEEE},doi={10.1109/SII.2019.8700399},}
@inproceedings{beltran2018GPS,title={Learning to grasp with guided policy search},author={Beltran, Cristian and Petit, Damien and Matsubara, Takamitsu and Ramirez-Alpizar, Ixchel and Harada, Kensuke},booktitle={第36回日本ロボット学会学術講演会 RSJ2018},year={2018},organization={RSJ},}
MIKE
Industry 4.0, Intelligent Visual Assisted Picking Approach
@inproceedings{arbulu2018industry,title={Industry 4.0, Intelligent Visual Assisted Picking Approach},author={Arbulu, Mario and Mateus, Paola and Wagner, Manuel and Beltran, Cristian and Harada, Kensuke},booktitle={International Conference on Mining Intelligence and Knowledge Exploration},pages={205--214},year={2018},organization={Springer},doi={10.1007/978-3-030-05918-7_18},}