Soft wrists and hands, tactile sensing, and compliant contact-rich manipulation via physical softness rather than active force control.
This theme focuses on passive compliance through soft robotics and tactile sensing: using soft wrists for robust object insertion and contact-rich manipulation, tactile memory and masked encoding, soft hands (e.g. SCU-Hand for granular scooping, PLEXUS hand for dexterous manipulation, funnel-shaped hands for powder handling), sim-to-real and failure recovery for soft object insertion, and learning robotic assembly by leveraging physical softness and tactile feedback. The emphasis is on compliance and robustness coming from the hardware and sensing rather than from learned active force control.
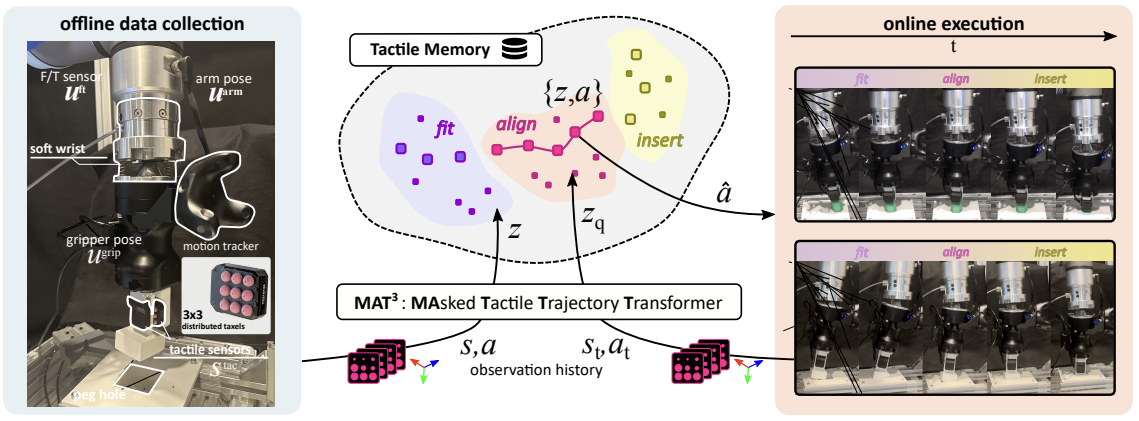
@article{kamijo2026tactile,title={Tactile Memory with Soft Robot: Robust Object Insertion via Masked Encoding and Soft Wrist},author={Kamijo, Tatsuya and Nishimura, Mai and Beltran-Hernandez, Cristian C and Shibasaki, Nodoka and Hamaya, Masashi},journal={IEEE Robotics and Automation Letters},doi={10.1109/LRA.2026.3692097},year={2026},}
ICRA
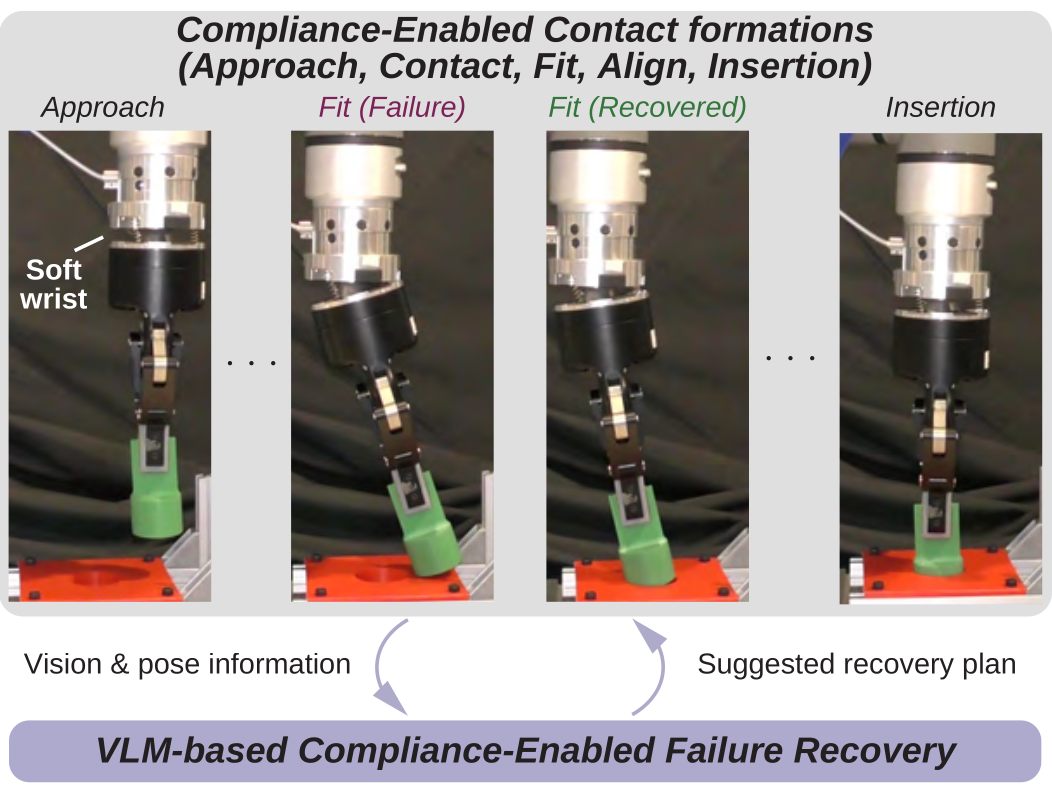
Robust and Resilient Soft Robotic Object Insertion with Compliance-Enabled Contact Formation and Failure Recovery
Mimo Shirasaka, Cristian C. Beltran-Hernandez, Masashi Hamaya, and Yoshitaka Ushiku
In IEEE International Conference on Robotics and Automation (ICRA), 2026
@inproceedings{shirasaka2026recovery,title={Robust and Resilient Soft Robotic Object Insertion with Compliance-Enabled Contact Formation and Failure Recovery},author={Shirasaka, Mimo and Beltran-Hernandez, Cristian C. and Hamaya, Masashi and Ushiku, Yoshitaka},booktitle={IEEE International Conference on Robotics and Automation (ICRA)},year={2026},url={https://arxiv.org/abs/2509.17666},}
ICRA
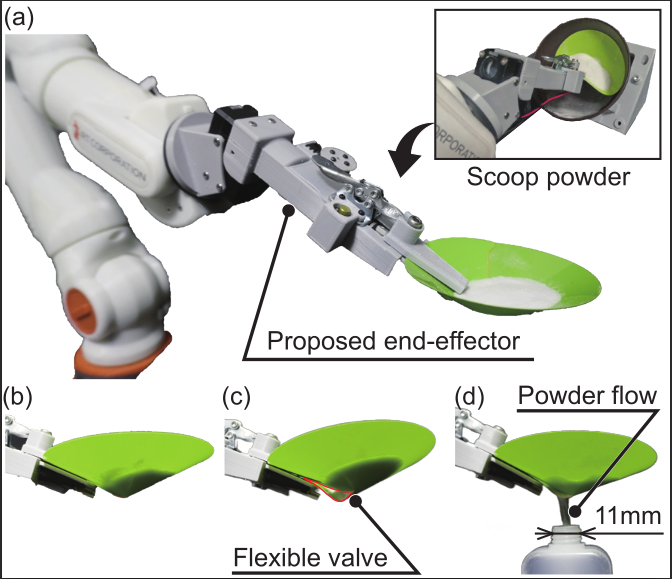
A Flexible Funnel-Shaped Robotic Hand with an Integrated Single-Sheet Valve for Milligram-Scale Powder Handling
Tomoya Takahashi, Yusaku Nakajima, Cristian C. Beltran-Hernandez, Yuki Kuroda, Kazutoshi Tanaka, and 3 more authors
In IEEE International Conference on Robotics and Automation (ICRA), 2026
@inproceedings{takahashi2026scuhand,author={Takahashi, Tomoya and Nakajima, Yusaku and Beltran-Hernandez, Cristian C. and Kuroda, Yuki and Tanaka, Kazutoshi and Hamaya, Masashi and Ono, Kanta and Ushiku, Yoshitaka},title={A Flexible Funnel-Shaped Robotic Hand with an Integrated Single-Sheet Valve for Milligram-Scale Powder Handling },booktitle={IEEE International Conference on Robotics and Automation (ICRA)},year={2026},}
ICRA
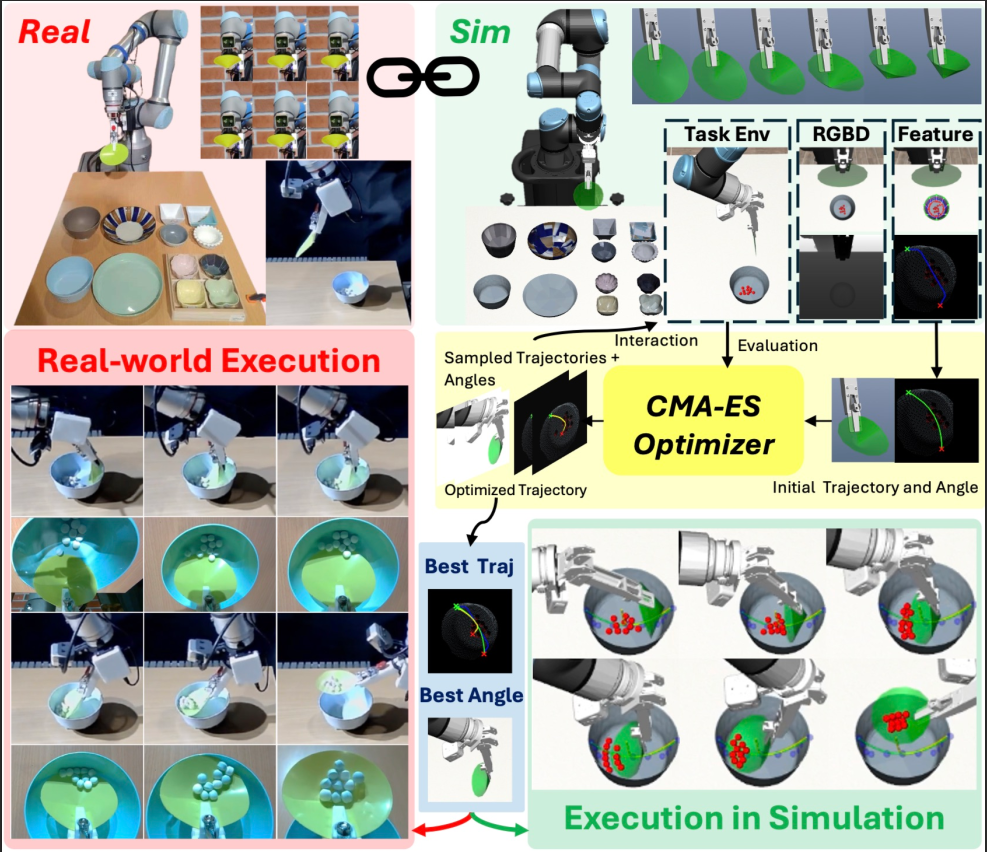
Simulation-Driven Evolutionary Motion Parameterization for Contact-Rich Granular Scooping with a Soft Conical Robotic Hand
Yongliang Wang, Cristian C. Beltran-Hernandez, Tomoya Takahashi, and Masashi Hamaya
In IEEE International Conference on Robotics and Automation (ICRA), 2026
@inproceedings{yongliang2026simulation,title={Simulation-Driven Evolutionary Motion Parameterization for Contact-Rich Granular Scooping with a Soft Conical Robotic Hand},author={Wang, Yongliang and Beltran-Hernandez, Cristian C. and Takahashi, Tomoya and Hamaya, Masashi},booktitle={IEEE International Conference on Robotics and Automation (ICRA)},year={2026},url={https://arxiv.org/abs/2509.17666}}
SII
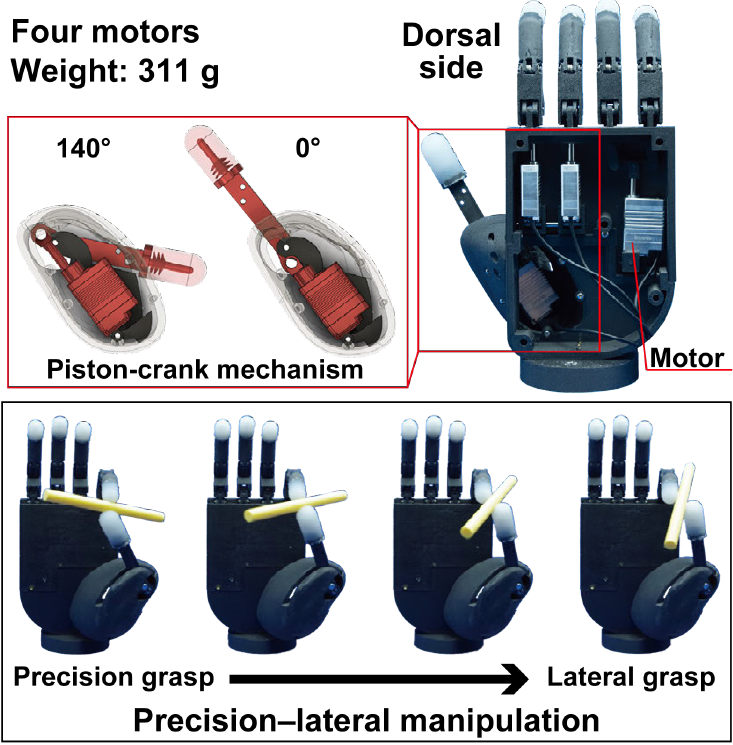
Stable In-Hand Manipulation for a Lightweight Four-Motor Prosthetic Hand
@inproceedings{kuroda2026stable,title={Stable In-Hand Manipulation for a Lightweight Four-Motor Prosthetic Hand},author={Kuroda, Yuki and Takahashi, Tomoya and Beltran-Hernandez, Cristian C. and Hamaya, Masashi and Tanaka, Kazutoshi},year={2026},url={https://arxiv.org/abs/2601.07559},}
2025
ICRA
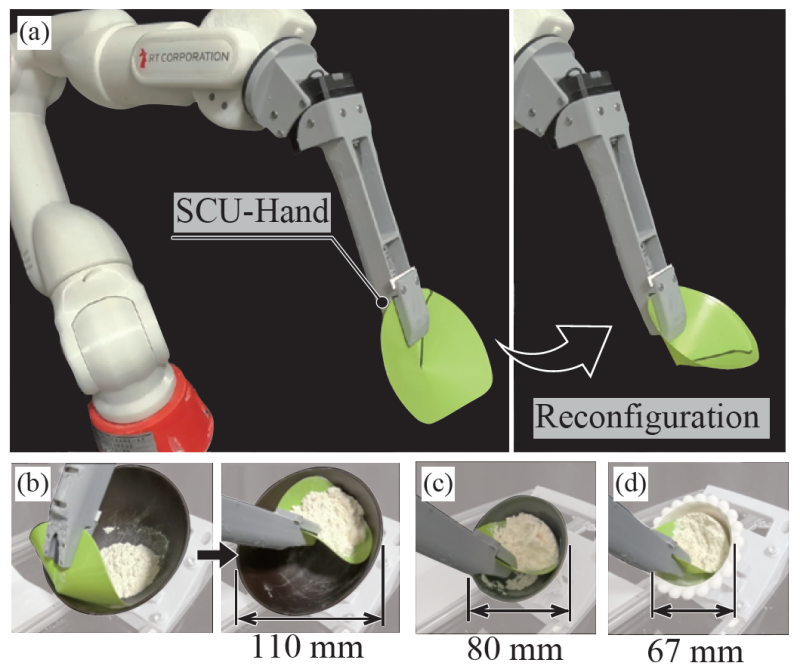
SCU-Hand: Soft Conical Universal Robotic Hand for Scooping Granular Media from Containers of Various Sizes
@inproceedings{takahashi2025scuhand,author={Takahashi, Tomoya and Beltran-Hernandez, Cristian C. and Kuroda, Yuki and Tanaka, Kazutoshi and Hamaya, Masashi and Ushiku, Yoshitaka},title={SCU-Hand: Soft Conical Universal Robotic Hand for Scooping Granular Media from Containers of Various Sizes},booktitle={IEEE International Conference on Robotics and Automation (ICRA)},year={2025},}
ICORR
PLEXUS Hand: Lightweight Four-Motor Prosthetic Hand Enabling Precision-Lateral Dexterous Manipulation
@inproceedings{kuroda2025plexushand,author={Kuroda, Yuki and Takahashi, Tomoya and Beltran-Hernandez, Cristian C. and Hamaya, Masashi and Tanaka, Kazutoshi},title={PLEXUS Hand: Lightweight Four-Motor Prosthetic Hand Enabling Precision-Lateral Dexterous Manipulation},booktitle={IEEE-RAS-EMBS International Conference on Rehabilitation Robotics (ICORR)},year={2025},}
2024
IROS
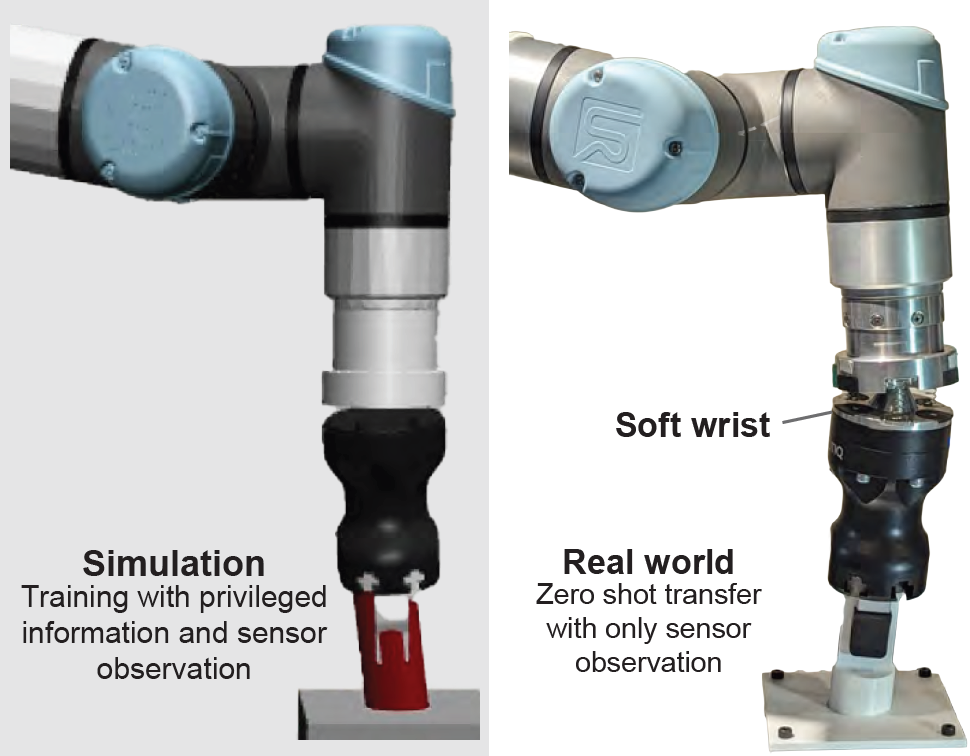
Robotic Object Insertion with a Soft Wrist through Sim-to-Real Privileged Training
Yuni Fuchioka, Cristian C. Beltran-Hernandez, Nguyen Hai, and Masashi Hamaya
In IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2024
@inproceedings{yuni2024soft,author={Fuchioka, Yuni and Beltran-Hernandez, Cristian C. and Hai, Nguyen and Hamaya, Masashi},title={Robotic Object Insertion with a Soft Wrist through Sim-to-Real Privileged Training},year={2024},booktitle={IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)},}
2023
IROS
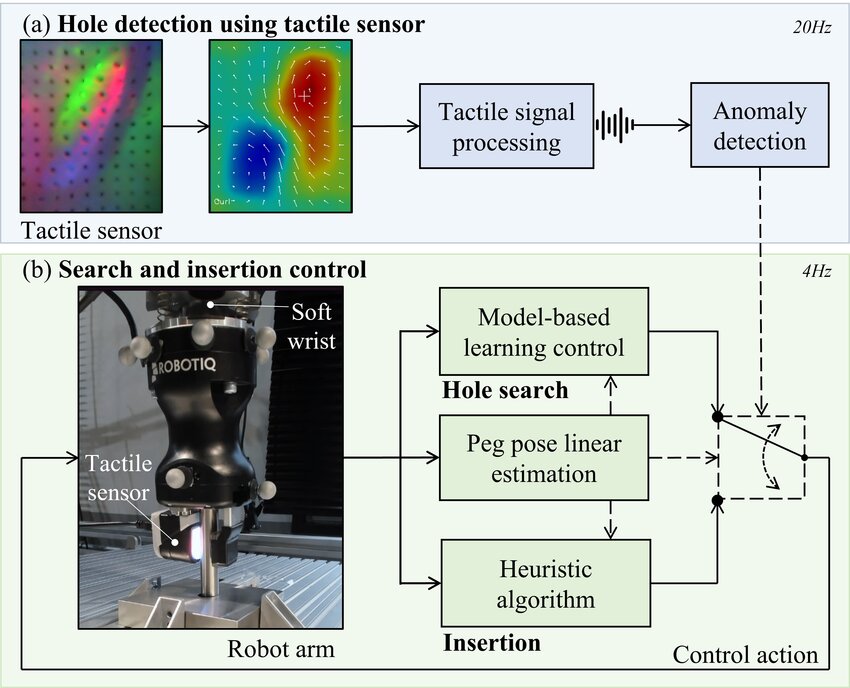
Learning Robotic Assembly by Leveraging Physical Softness and Tactile Sensing
@inproceedings{royo2023learning,author={Royo-Miquel, Joaquín and Hamaya, Masashi and Beltran-Hernandez, Cristian C. and Tanaka, Kazutoshi},booktitle={IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)},title={Learning Robotic Assembly by Leveraging Physical Softness and Tactile Sensing},year={2023},pages={6469-6476},keywords={Wrist;Robotic assembly;Training;Uncertainty;Tactile sensors;Soft robotics;Sensors},doi={10.1109/IROS55552.2023.10341471},}