Learning from demonstrations—hybrid trajectory and force imitation, diffusion policies, learning from few demos and haptic teleoperation for contact-rich manipulation.
This theme covers imitation learning for contact-rich manipulation: hybrid trajectory-and-force learning to imitate human assembly skills, adaptive imitation learning for complex contact-rich insertion tasks, learning variable compliance control from a few demonstrations (e.g. with haptic feedback teleoperation), diffusion policies from demonstrations for compliant contact-rich manipulation, and cooperative manipulation with residual force control from demonstrations. The emphasis is on learning manipulation policies from human demonstrations rather than pure reinforcement learning.
@inproceedings{aburub2024learning,title={Learning Diffusion Policies from Demonstrations For Compliant Contact-rich Manipulation},author={Aburub, Malek and Beltran-Hernandez, Cristian C. and Kamijo, Tatsuya and Hamaya, Masashi},year={2026},archiveprefix={arXiv},primaryclass={cs.RO},url={https://arxiv.org/abs/2410.19235},}
2025
Under Review
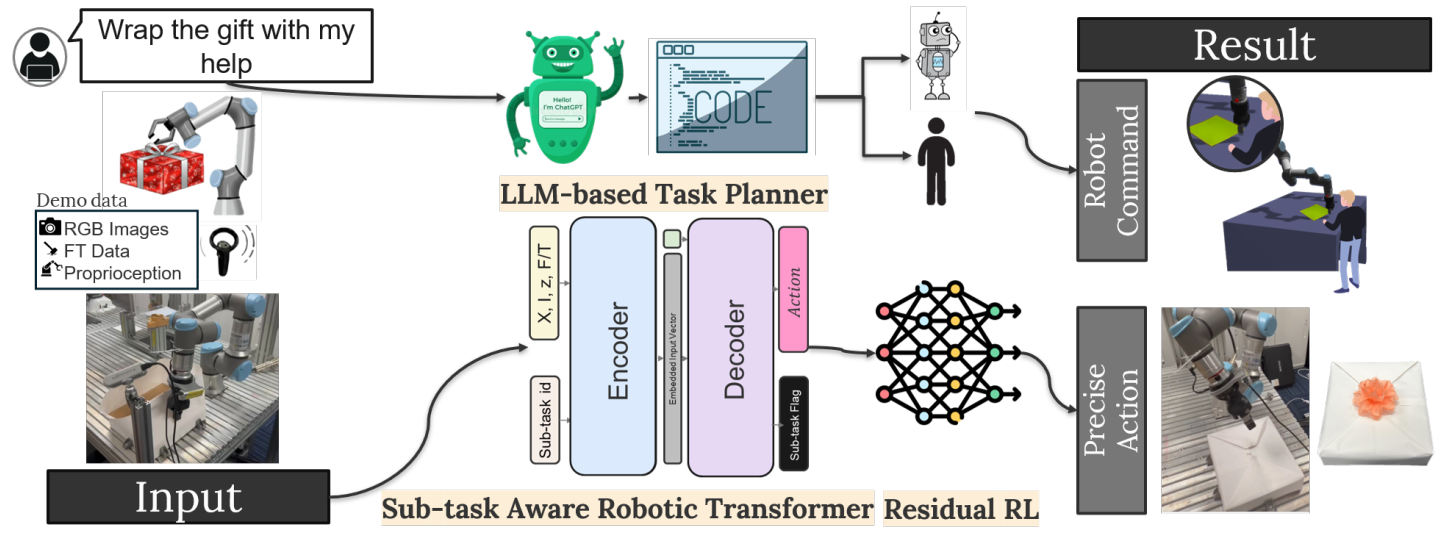
Learning-based Cooperative Robotic Paper Wrapping: A Unified Control Policy with Residual Force Control
@misc{ali2025learning,title={Learning-based Cooperative Robotic Paper Wrapping: A Unified Control Policy with Residual Force Control},author={Ali, Rewida and Beltran-Hernandez, Cristian C and Wan, Weiwei and Harada, Kensuke},primaryclass={cs.RO},year={2025},}
2024
IROS
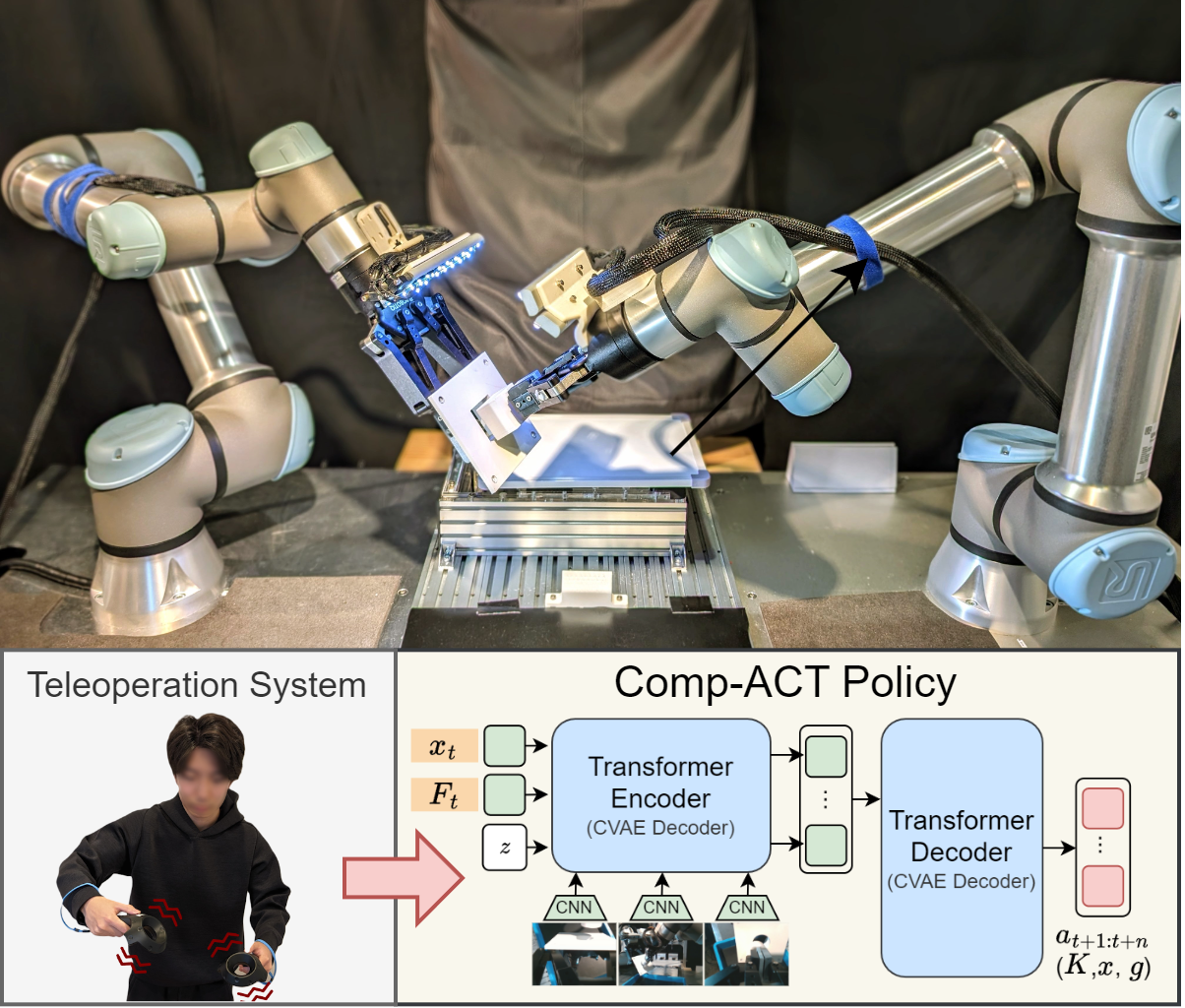
Learning Variable Compliance Control From a Few Demonstrations for Bimanual Robot with Haptic Feedback Teleoperation System
Tatsuya Kamijo, Cristian C. Beltran-Hernandez, and Masashi Hamaya
In IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2024
2nd Best Poster - Collecting, Managing, and Utilizing Data through embodied Robots workshop - IROS2024
@inproceedings{kamijo2024learning,author={Kamijo, Tatsuya and Beltran-Hernandez, Cristian C. and Hamaya, Masashi},title={Learning Variable Compliance Control From a Few Demonstrations for Bimanual Robot with Haptic Feedback Teleoperation System},booktitle={IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)},year={2024},}
2022
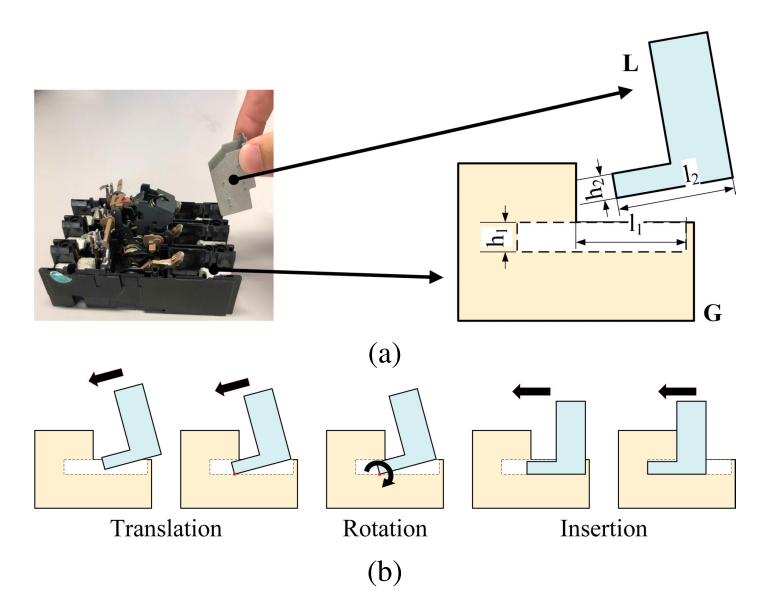
An Adaptive Imitation Learning Framework for Robotic Complex Contact-Rich Insertion Tasks
@article{wang2022adaptive,title={An Adaptive Imitation Learning Framework for Robotic Complex Contact-Rich Insertion Tasks},author={Wang, Yan and Beltran-Hernandez, Cristian C and Wan, Weiwei and Harada, Kensuke},journal={Frontiers in Robotics and AI},pages={414},year={2022},publisher={Frontiers},doi={10.3389/frobt.2021.777363},}
2021
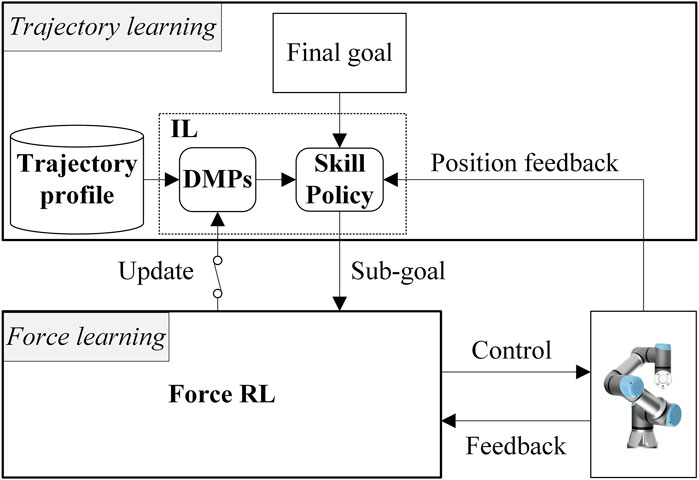
Hybrid Trajectory and Force Learning of Complex Assembly Tasks: A Combined Learning Framework
@article{wang2021hybrid,author={Wang, Yan and Beltran-Hernandez, Cristian C. and Wan, Weiwei and Harada, Kensuke},journal={IEEE Access},title={Hybrid Trajectory and Force Learning of Complex Assembly Tasks: A Combined Learning Framework},year={2021},volume={9},number={},pages={60175-60186},doi={10.1109/ACCESS.2021.3073711},}
ICRA
Robotic Imitation of Human Assembly Skills Using Hybrid Trajectory and Force Learning
@inproceedings{wang2021robotic,author={Wang, Yan and Beltran-Hernandez, Cristian C. and Wan, Weiwei and Harada, Kensuke},booktitle={IEEE International Conference on Robotics and Automation (ICRA)},title={Robotic Imitation of Human Assembly Skills Using Hybrid Trajectory and Force Learning},year={2021},volume={},number={},pages={11278-11284},doi={10.1109/ICRA48506.2021.9561619},}