Robotic control library for Universal Robots on ROS1
Collection of utilities for easily controlling Universal Robots either on the Gazebo simulator or the real robots.
Simultion environment for Universal Robot arms, used for research project to learn contact-rich manipulation tasks. The default set up uses UR3e but it can be adapted to any Universal Robot arm.
@article{beltran2020learning,title={Learning Force Control for Contact-rich Manipulation Tasks with Rigid Position-controlled Robots},author={Beltran-Hernandez, Cristian Camilo and Petit, Damien and Ramirez-Alpizar, Ixchel Georgina and Nishi, Takayuki and Kikuchi, Shinichi and Matsubara, Takamitsu and Harada, Kensuke},journal={IEEE Robotics and Automation Letters},volume={5},number={4},pages={5709--5716},year={2020},publisher={IEEE},doi={10.1109/LRA.2020.3010739},dimensions={true}}
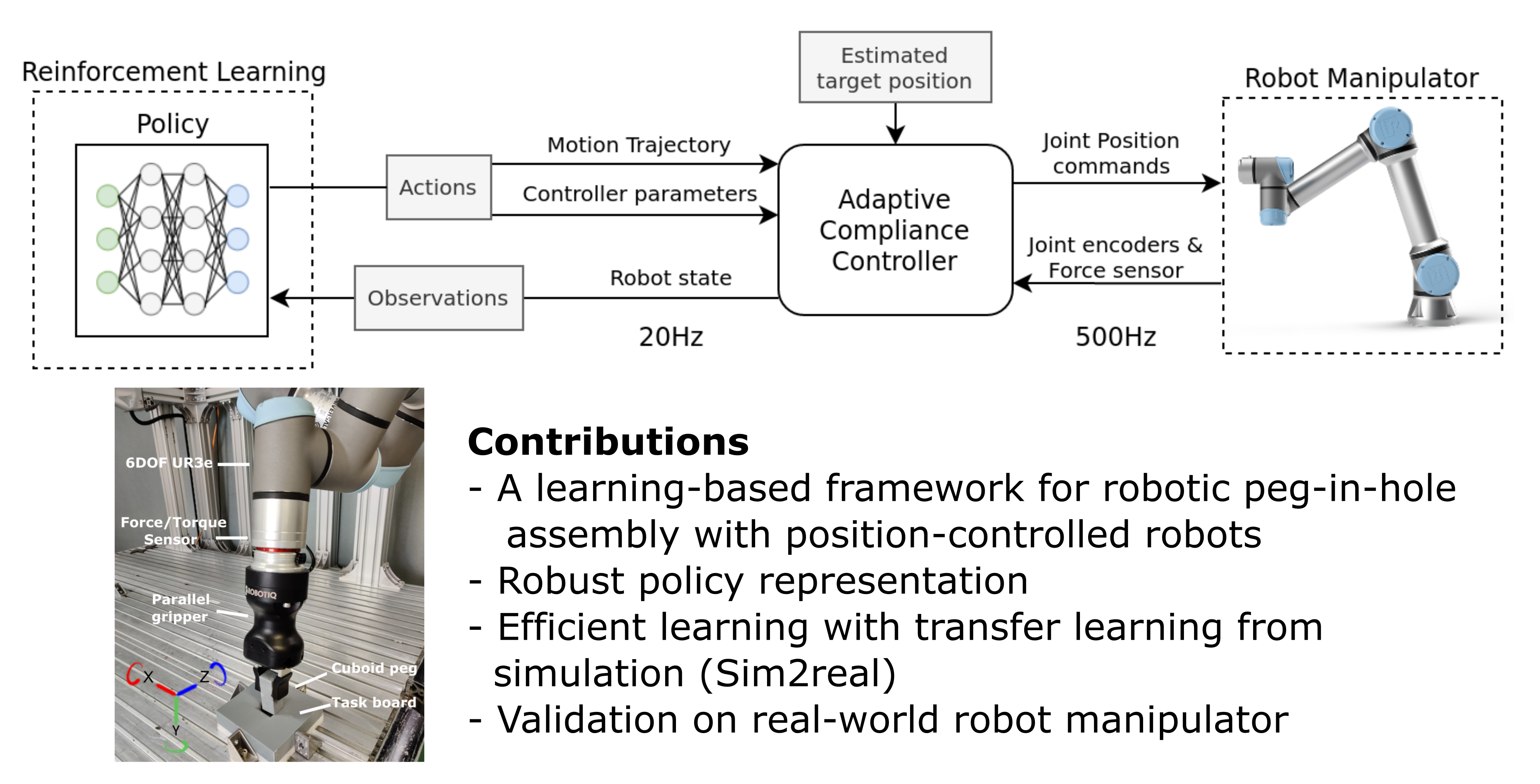
Variable compliance control for robotic peg-in-hole assembly: A deep-reinforcement-learning approach
@article{beltran2020variable,title={Variable compliance control for robotic peg-in-hole assembly: A deep-reinforcement-learning approach},author={Beltran-Hernandez, Cristian C and Petit, Damien and Ramirez-Alpizar, Ixchel G and Harada, Kensuke},journal={Applied Sciences},volume={10},number={19},pages={6923},year={2020},publisher={MDPI},doi={10.3390/app10196923},}