Collection of utilities for easily controlling Universal Robots either on the Gazebo simulator or the real robots.
Simultion environment for Universal Robot arms, used for research project to learn contact-rich manipulation tasks. The default set up uses UR3e but it can be adapted to any Universal Robot arm.
@article{beltran2020learning,title={Learning Force Control for Contact-rich Manipulation Tasks with Rigid Position-controlled Robots},author={Beltran-Hernandez, Cristian Camilo and Petit, Damien and Ramirez-Alpizar, Ixchel Georgina and Nishi, Takayuki and Kikuchi, Shinichi and Matsubara, Takamitsu and Harada, Kensuke},journal={IEEE Robotics and Automation Letters},volume={5},number={4},pages={5709--5716},year={2020},publisher={IEEE},doi={10.1109/LRA.2020.3010739},}
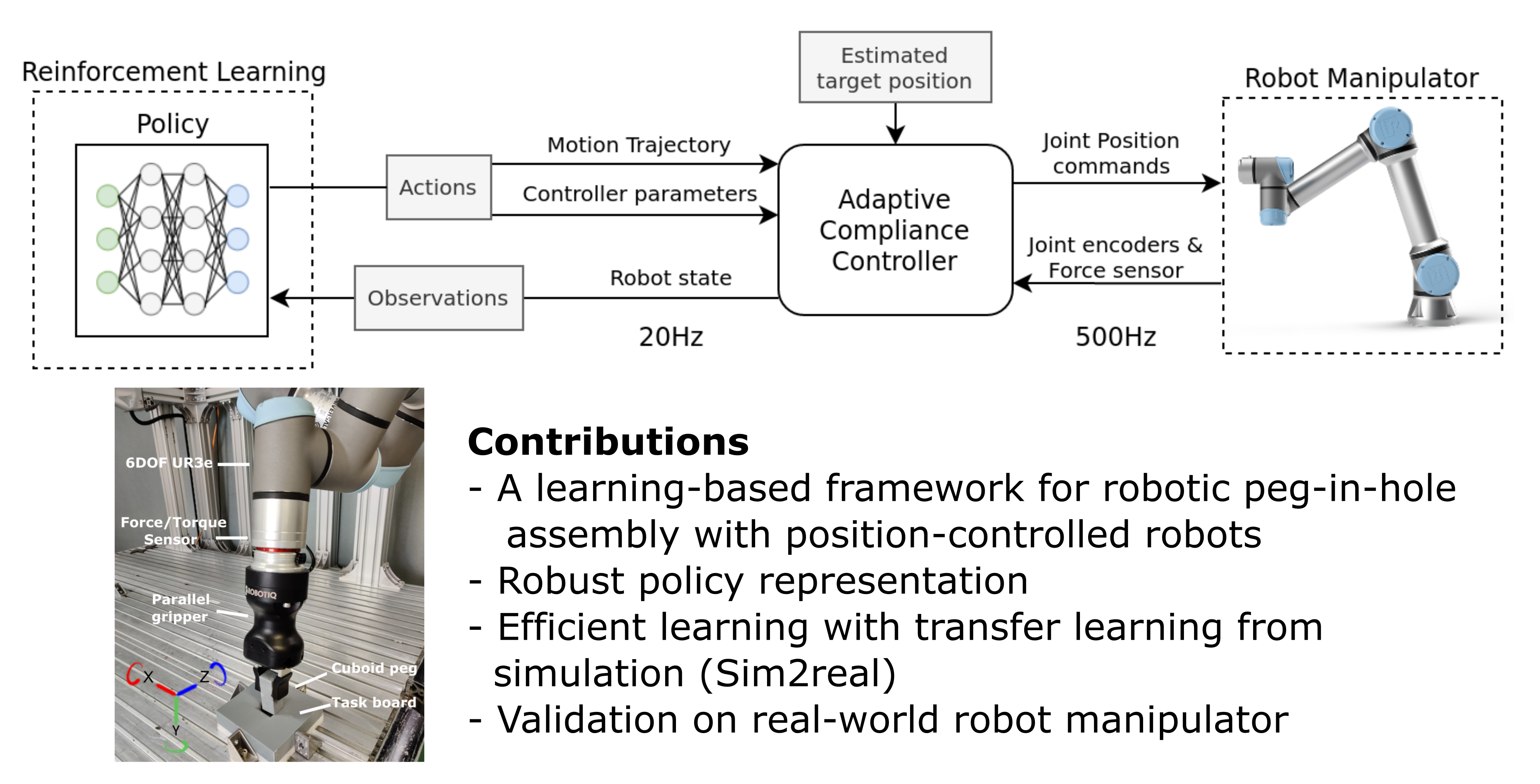
Variable compliance control for robotic peg-in-hole assembly: A deep-reinforcement-learning approach
@article{beltran2020variable,title={Variable compliance control for robotic peg-in-hole assembly: A deep-reinforcement-learning approach},author={Beltran-Hernandez, Cristian C and Petit, Damien and Ramirez-Alpizar, Ixchel G and Harada, Kensuke},journal={Applied Sciences},volume={10},number={19},pages={6923},year={2020},publisher={MDPI},doi={10.3390/app10196923},}