Robot learning for cooking—food slicing, task and motion planning for food preparation, and integrated TAMP for real-world cooking tasks.
This theme focuses on robot learning for cooking: food slicing (e.g. SliceIt!—a dual simulator framework for learning robot food slicing), task and motion planning for robotic food preparation, and integrated task and motion planning for real-world cooking tasks. The goal is to enable robots to perform cooking-related manipulation from perception and planning to execution.
@inproceedings{siburian2025integrated,author={Siburian, Jeremy and Beltran-Hernandez, Cristian C. and Hamaya, Masashi},title={Practical Task and Motion Plannign for Robotic Food Preparation},booktitle={IEEE/SICE International Symposium on System Integrations},year={2025},doi={10.1109/SII59315.2025.10870896},}
2024
ICRA
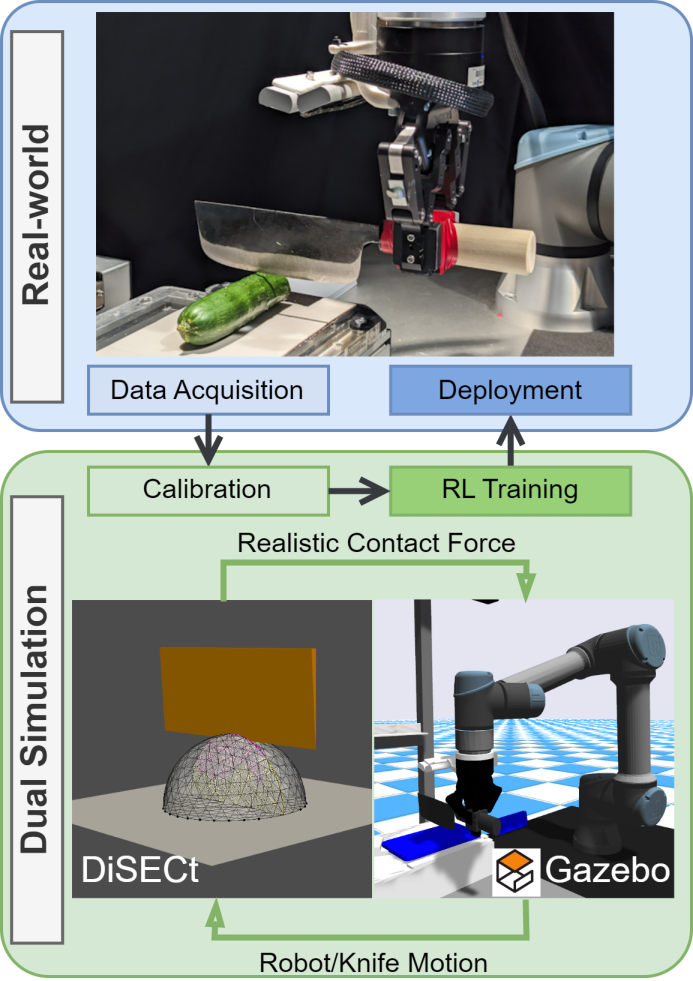
SliceIt! - A Dual Simulator Framework for Learning Robot Food Slicing
Cristian C. Beltran-Hernandez, Nicolas Erbetti, and Masashi Hamaya
In IEEE International Conference on Robotics and Automation (ICRA), 2024
Best Poster - Cooking Robotics workshop - ICRA2024
@inproceedings{beltran2024sliceit,author={Beltran-Hernandez, Cristian C. and Erbetti, Nicolas and Hamaya, Masashi},title={SliceIt! - A Dual Simulator Framework for Learning Robot Food Slicing},year={2024},booktitle={IEEE International Conference on Robotics and Automation (ICRA)},}
ICRA Workshop
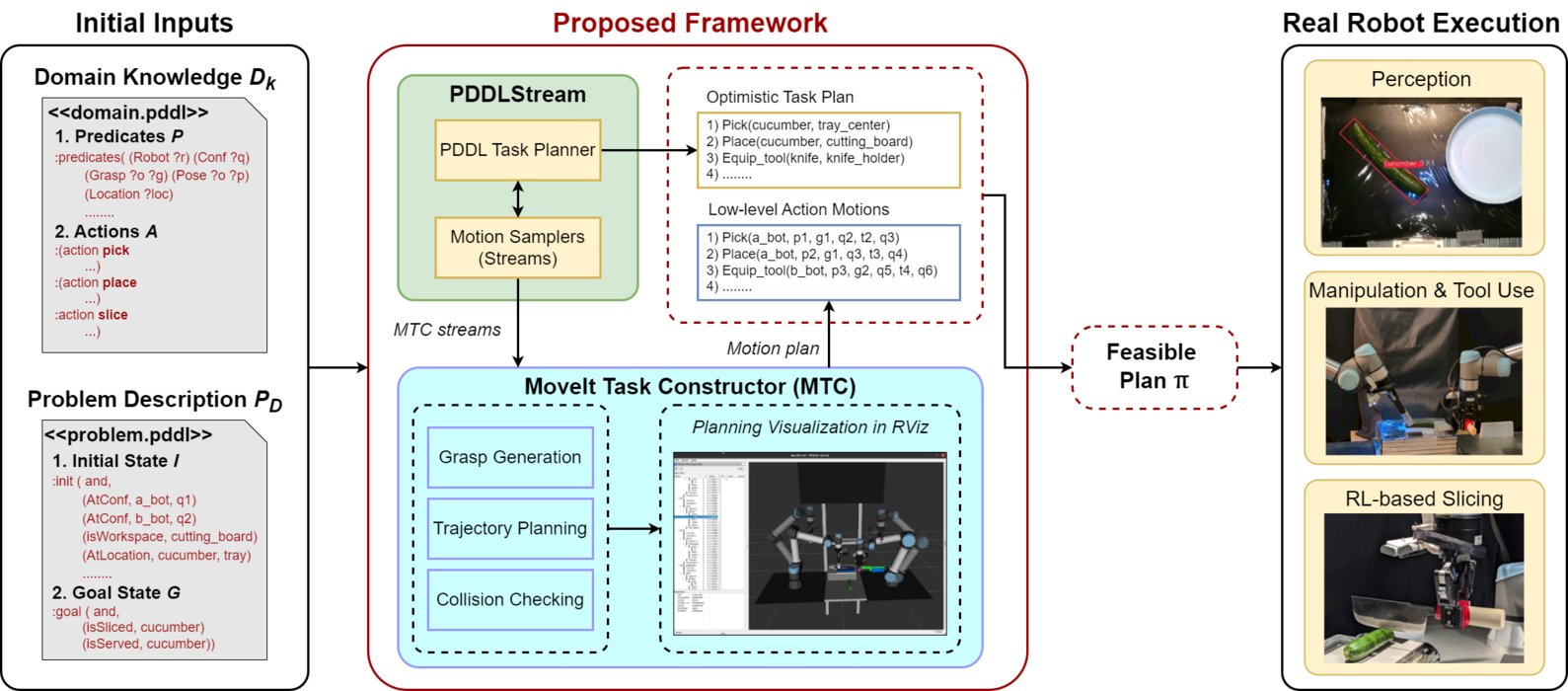
Integrated Task and Motion Planning for Real-World Cooking Tasks
Jeremy Siburian, Cristian C. Beltran-Hernandez, and Masashi Hamaya
In ICRA Workshop on Cooking Robotics: Perception and Motion Planning, 2024
@inproceedings{siburian2024integrated,author={Siburian, Jeremy and Beltran-Hernandez, Cristian C. and Hamaya, Masashi},title={Integrated Task and Motion Planning for Real-World Cooking Tasks},booktitle={ICRA Workshop on Cooking Robotics: Perception and Motion Planning},year={2024},}