Learning force and variable compliance control for contact-rich manipulation with position-controlled robots, RL for assembly, and industrial deployment.
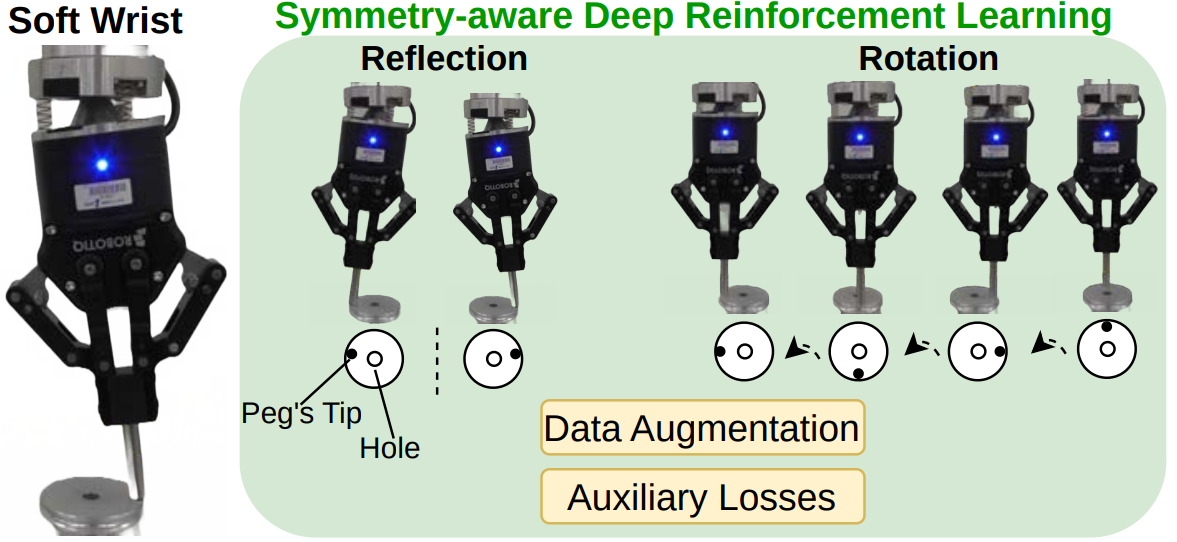
This theme focuses on active compliance control with rigid, position-controlled robots: learning force and variable compliance for contact-rich manipulation (e.g. peg-in-hole assembly and insertion) via reinforcement learning, curriculum learning for contact-rich tasks, uncertainty-aware manipulation planning using gravity and environment geometry, symmetry-aware RL for assembly under partial observability, and deployment in industrial assembly (e.g. World Robot Summit, jigless assembly).
Topics include variable compliance control via deep RL, learning force control without force sensors, and high-precision jigless assembly.
@inproceedings{hai2023symmetry,author={Nguyen, Hai and Kozuno, Tadashi and Beltran-Hernandez, Cristian C. and Hamaya, Masashi},title={Symmetry-aware Reinforcement Learning for Robotic Assembly under Partial Observability with a Soft Wrist},year={2024},booktitle={IEEE International Conference on Robotics and Automation (ICRA)},}
2022
ArXiv
Accelerating Robot Learning of Contact-Rich Manipulations: A Curriculum Learning Study
@unpublished{beltran2022accelerating,title={Accelerating Robot Learning of Contact-Rich Manipulations: A Curriculum Learning Study},author={Beltran-Hernandez, Cristian C and Petit, Damien and Ramirez-Alpizar, Ixchel G and Harada, Kensuke},journal={arXiv preprint arXiv:2204.12844},year={2022},doi={10.48550/arXiv.2204.12844},}
Advance Robotics
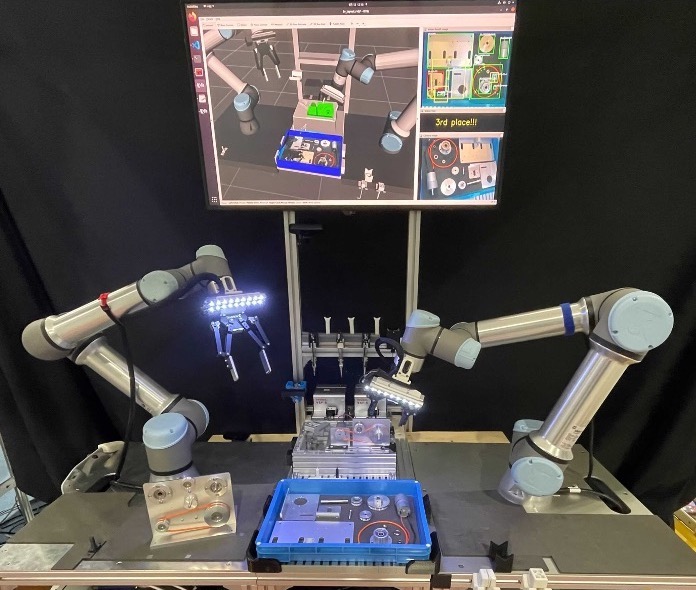
Team O2AC at the World Robot Summit 2020: Towards Jigless, High-Precision Assembly
@article{von2022o2ac,author={von Drigalski, Felix and Kasaura, Kazumi and Beltran-Hernandez, Cristian C. and Hamaya, Masashi and Tanaka, Kazutoshi and Matsubara, Takamitsu},journal={Advance Robotics},title={Team O2AC at the World Robot Summit 2020: Towards Jigless, High-Precision Assembly},volume={36},number={22},pages={1213--1227},year={2022},publisher={Taylor \& Francis},doi={10.1080/01691864.2022.2138541},}
IROS+RAL
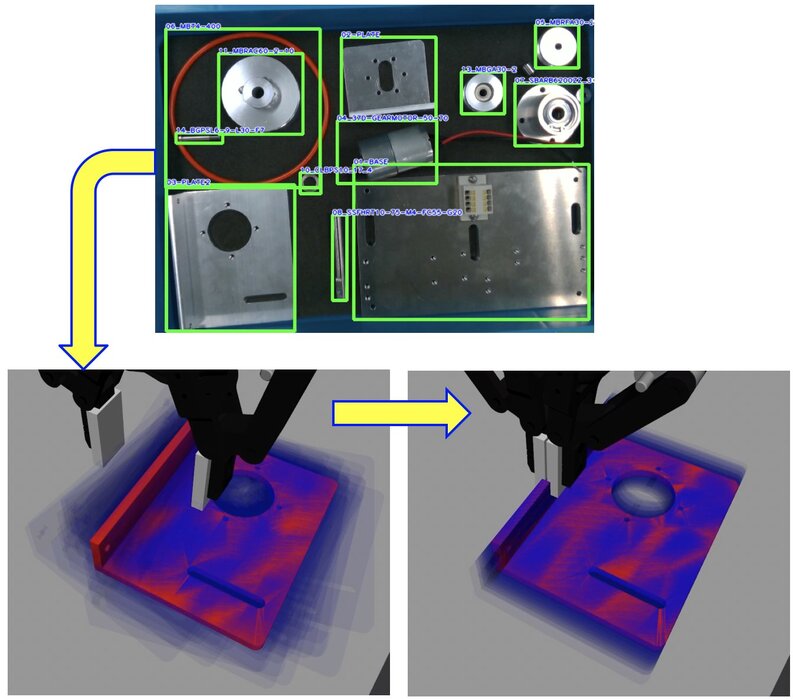
Uncertainty-Aware Manipulation Planning Using Gravity and Environment Geometry
@article{von2022uncertainty,author={von Drigalski, Felix and Kasaura, Kazumi and Beltran-Hernandez, Cristian C. and Hamaya, Masashi and Tanaka, Kazutoshi and Matsubara, Takamitsu},journal={IEEE Robotics and Automation Letters},title={Uncertainty-Aware Manipulation Planning Using Gravity and Environment Geometry},year={2022},volume={7},number={4},pages={11942-11949},doi={10.1109/LRA.2022.3207565},}
RSJ
Curriculum Reinforcement Learning for Industrial Insertion Tasks
@inproceedings{beltran2022rsj,title={Curriculum Reinforcement Learning for Industrial Insertion Tasks},author={Beltran, Cristian and Petit, Damien and Ramirez-Alpizar, Ixchel and Harada, Kensuke},booktitle={第40回日本ロボット学会学術講演会 RSJ2022},year={2022},organization={RSJ}}
2020
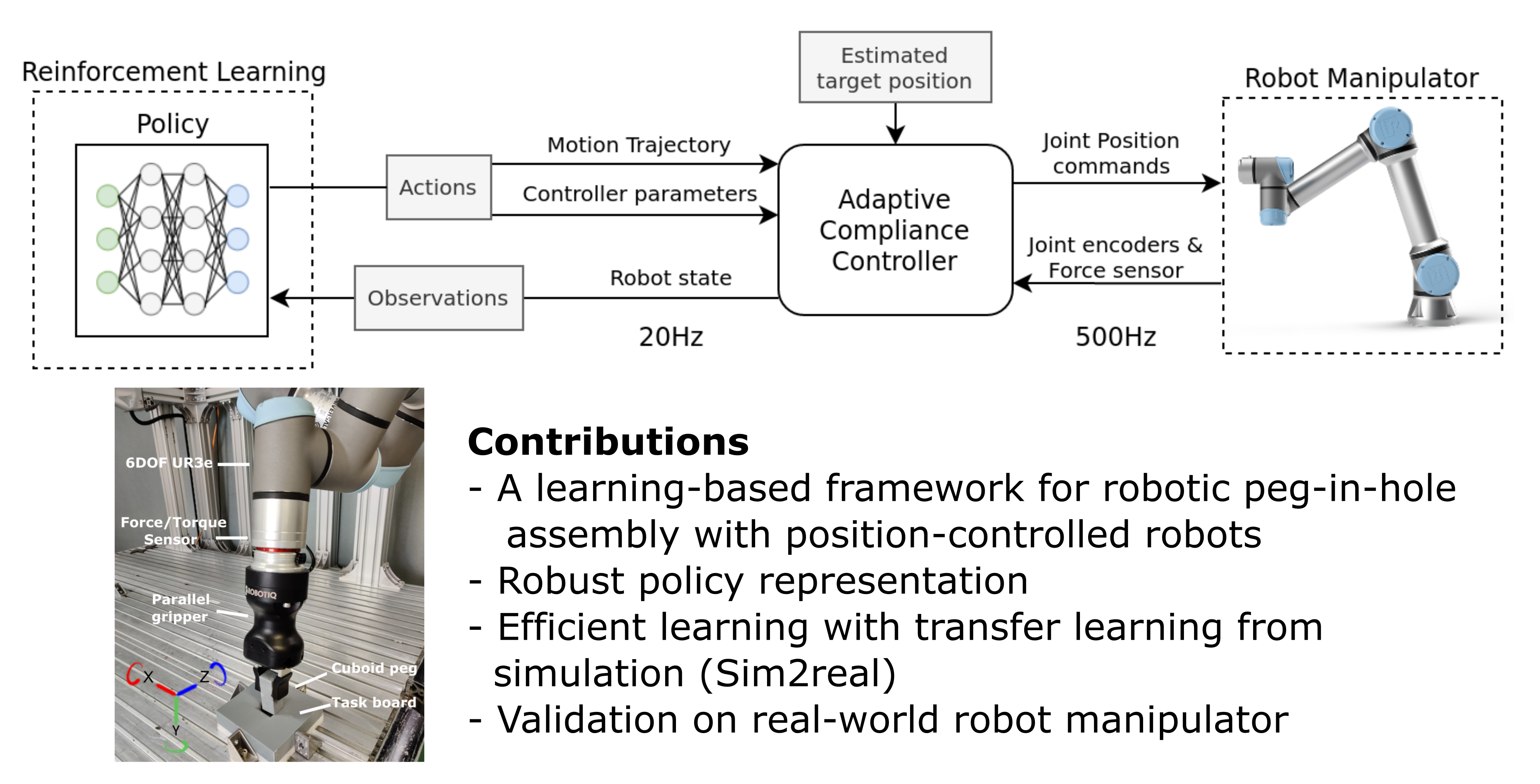
Variable compliance control for robotic peg-in-hole assembly: A deep-reinforcement-learning approach
@article{beltran2020variable,title={Variable compliance control for robotic peg-in-hole assembly: A deep-reinforcement-learning approach},author={Beltran-Hernandez, Cristian C and Petit, Damien and Ramirez-Alpizar, Ixchel G and Harada, Kensuke},journal={Applied Sciences},volume={10},number={19},pages={6923},year={2020},publisher={MDPI},doi={10.3390/app10196923},}
IROS + RAL
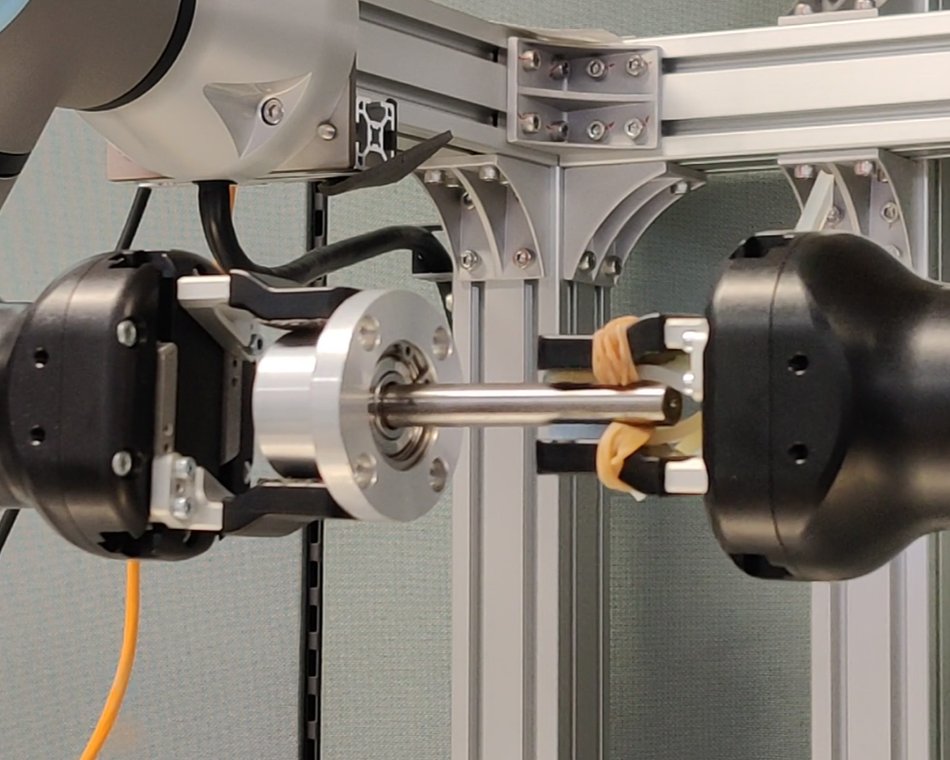
Learning Force Control for Contact-rich Manipulation Tasks with Rigid Position-controlled Robots
Cristian Camilo Beltran-Hernandez, Damien Petit, Ixchel Georgina Ramirez-Alpizar, Takayuki Nishi, Shinichi Kikuchi, and 2 more authors
@article{beltran2020learning,title={Learning Force Control for Contact-rich Manipulation Tasks with Rigid Position-controlled Robots},author={Beltran-Hernandez, Cristian Camilo and Petit, Damien and Ramirez-Alpizar, Ixchel Georgina and Nishi, Takayuki and Kikuchi, Shinichi and Matsubara, Takamitsu and Harada, Kensuke},journal={IEEE Robotics and Automation Letters},volume={5},number={4},pages={5709--5716},year={2020},publisher={IEEE},doi={10.1109/LRA.2020.3010739},}
2019
SII
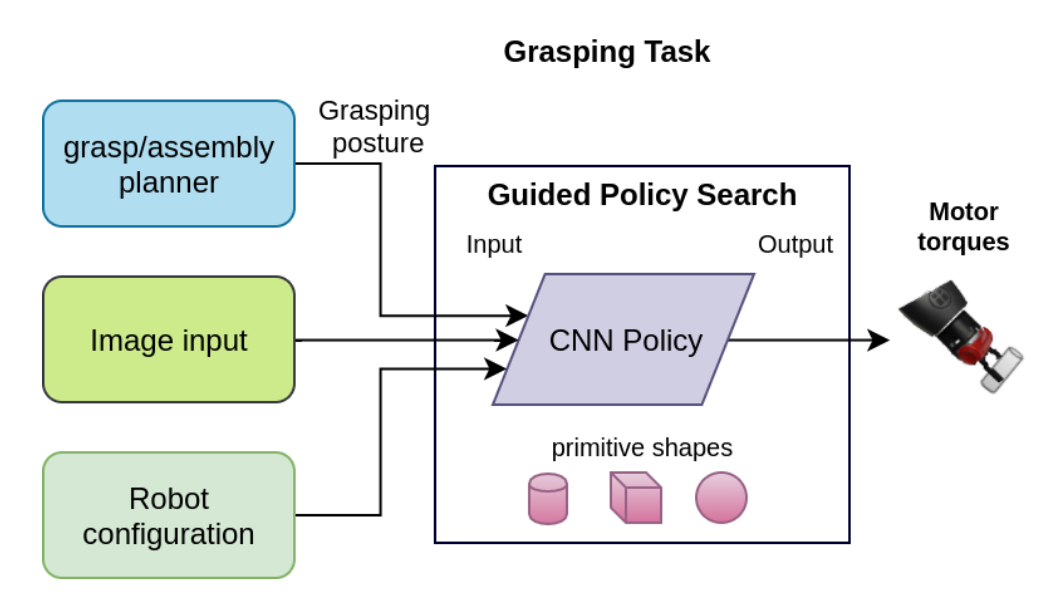
Learning to Grasp with Primitive Shaped Object Policies
@inproceedings{beltran2019learning,title={Learning to Grasp with Primitive Shaped Object Policies},author={Beltran-Hernandez, Cristian C and Petit, Damien and Ramirez-Alpizar, Ixchel G and Harada, Kensuke},booktitle={IEEE/SICE International Symposium on System Integration (SII)},pages={468--473},year={2019},organization={IEEE},doi={10.1109/SII.2019.8700399},}